







Сведения об уровне давления дают аппараты, называемые реле давления. Они нашли очень широкое применение благодаря своей простоте и возможности автоматизировать работу гидропневмопривода. На рис.2.131 показана конструктивная схема реле давления, которое может применяться в гидравлических приводах.
Входное отверстие А в корпусе 1 реле подсоединяется к тому рабочему каналу гидросистемы, о давлении в котором необходимо получить информацию. Если давление рабочей жидкости достигает уровня, настроенного путем изменения натяга пружины 3, то оно, воздействуя через мембрану на поршень 2, создает силу, поворачивающую рычаг 5. При этом происходит замыкание (или размыкание) электрических контактов в контактной группе 4, и появляется электрический сигнал о том, что давление в этом канале достигло необходимого уровня. Появившийся сигнал подается в систему управления для подключения других гидравлических устройств или аппаратов или осуществления других действий гидросистемы.
Аналогично работают и реле давления пневматических систем. На рис.2.132а показано реле давления модели РДП-5, в котором используется сильфон 4, установленный в корпусе 3. При достижении необходимого уровня давления Р в канале, подсоединяемом к штуцеру 7, поршень 6 с толкателем 2 перемещается вверх, отжимая сильфон 4 и пружину 5, и замыкает или размыкает контакты микропереключателя 1. Появившийся электрический сигнал используется системой управления.
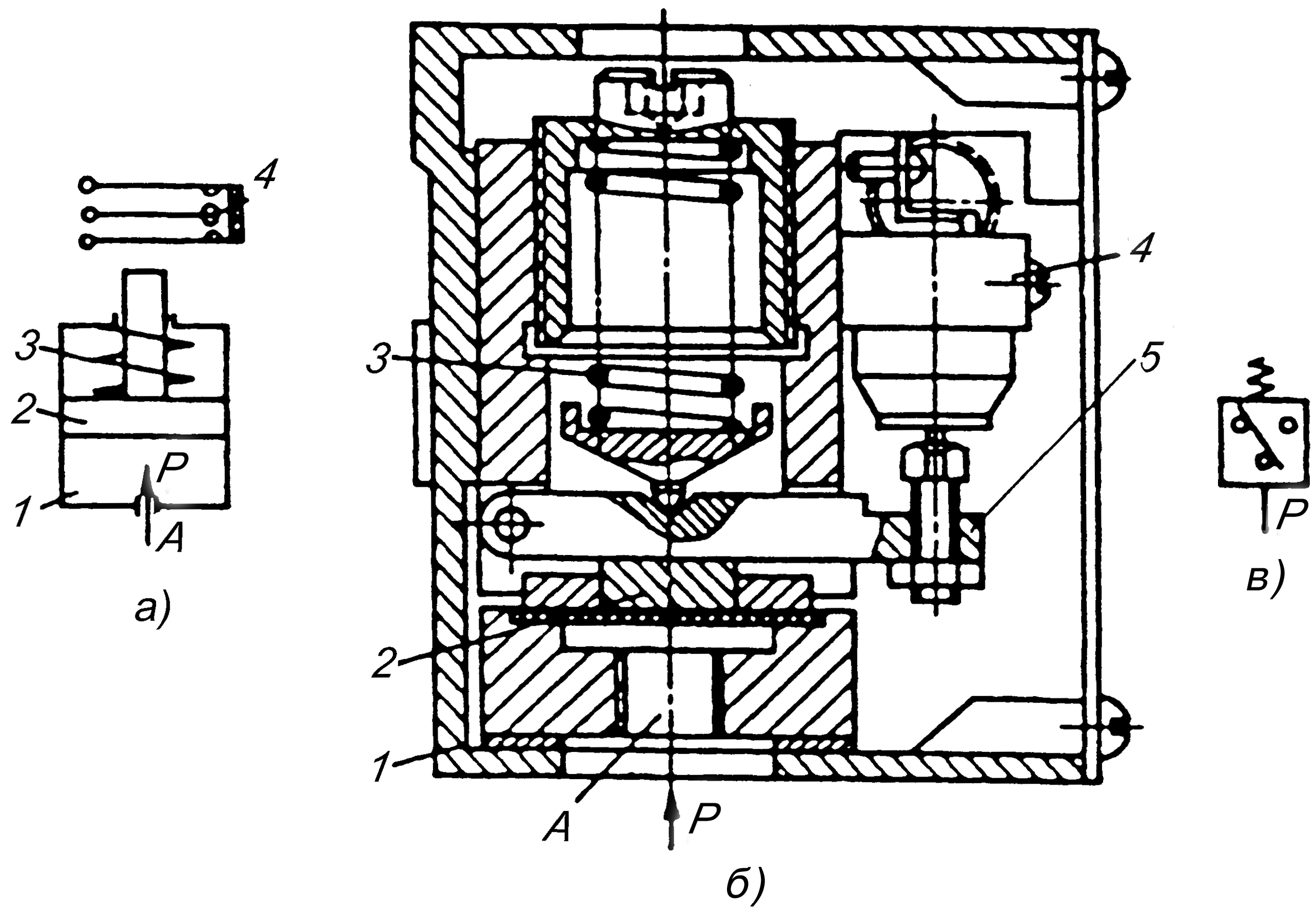
Рис. 2.131. Гидравлическое реле давления модели Г62-2: а - принципиальная схема, б - конструктивная схема, в - условное обозначение
Рассмотренные реле давления относят к реле давления измерительного типа, в котором аппарат реагирует на изменение давления в контролируемом канале.
Имеются реле давления дифференциального типа, которые срабатывают при достижении необходимой разности давлений в двух каких-либо каналах привода (например, в штоковой и бесштоковой полостях цилиндра). Реле давления такого типа приведено на рис.2.132б [12]. К отверстию А в корпусе 7 подсоединяется канал с низким давлением, а к отверстию Á канал с высоким давлением. Таким образом, на поршень 6 действует давление сверху и снизу. При достижении заданной разности этих давлений создается сила, достаточная для преодоления силы пружины 5. Тогда перемещение поршня вверх передается на штифт микропереключателя 4, связанного с пружинами 1 и 3, и тем самым осуществляется замыкание или размыкание контактов. Разность давления, при которой срабатывает реле, настраивается путем изменения натяга пружины 3 винтом 2.
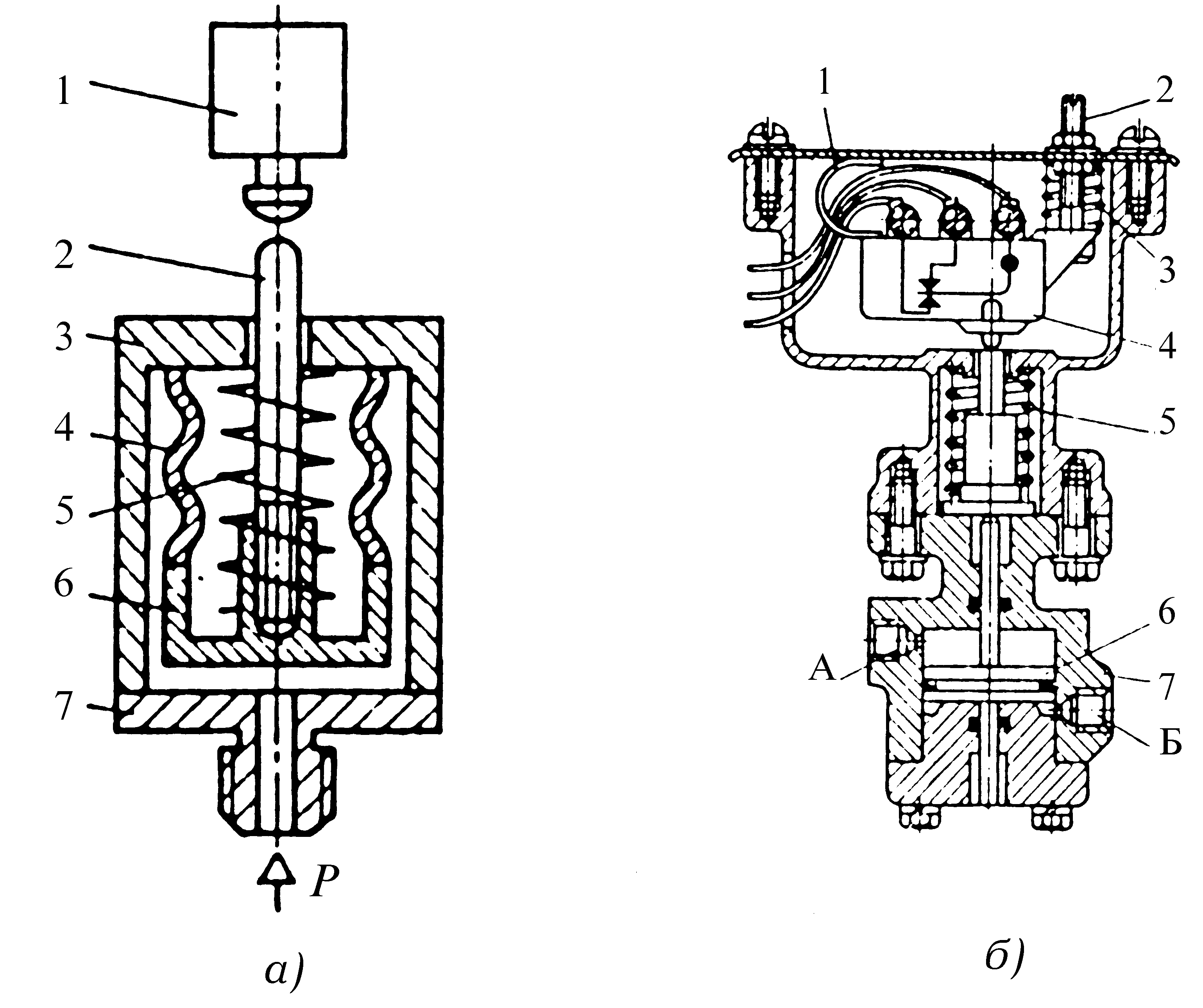
Рис. 2.132. Пневматические реле давления: а - модели РДП-5, б - дифференциального типа
Для визуального контроля наличия давления применяются индикаторы давления. Они бывают поршневого и лампового типа и предназначены для сигнализации о наличии давления в том канале, к которому они подсоединены.
Индикатор давления поршневого типа (рис.2.133а) модели В52-11 сигнализирует о наличии давления рабочей среды (сжатого воздуха) выдвижением штока 1 поршня 3, сжимающим пружину 2. Эта пружина возвращает поршень 3 вниз при падении давления. Манжетное уплотнение 4 герметизирует рабочую полость.
Индикаторы лампового типа (рис.2.133б, в, г) содержат подвижные элементы, окрашенные в яркие цвета, обеспечивающие четкую индикацию наличия давления в помещении с нормальной освещенностью. Так, индикатор давления модели П-ИДС (рис.2.133б) имеет подвижный поршень 2 с окрашенным коническим углублением. При наличии давления поршень 2 поднимается к прозрачной линзе 1, и появление цвета на линзе свидетельствует об этом.
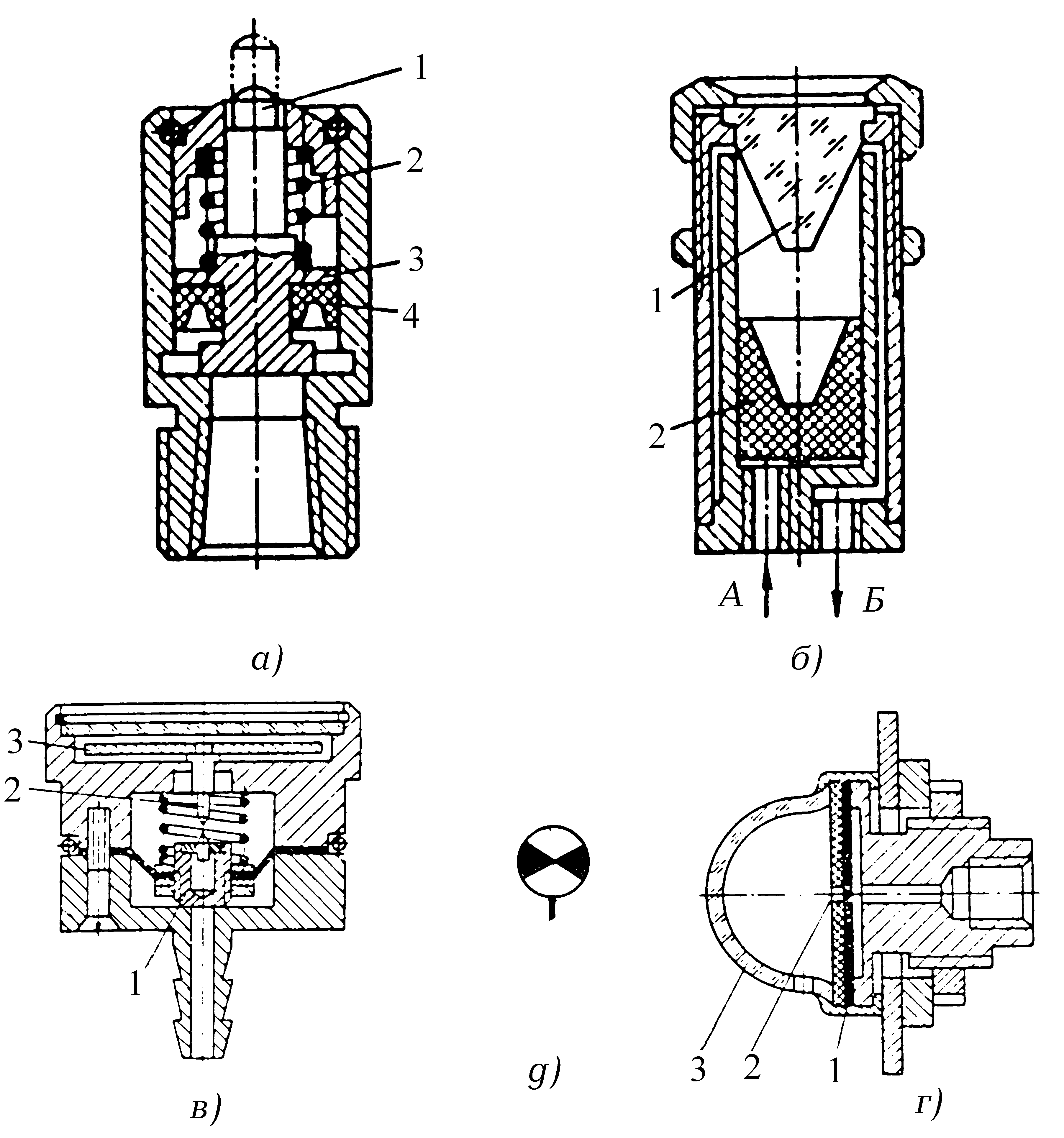
Рис. 2.133. Пневматические индикаторы давления: а - поршневого типа, б,в,г - лампового типа, д - условное обозначение
В индикаторе давления модели РУС-1 (рис.2.133в) под действием давления поднимается поршень 1 с шайбой и мембраной, сжимая пружину 2. При этом благодаря фигурному вырезу в шайбе окрашенный флажок 3 поворачивается на 90° и сигнализирует о наличии давления.
Индикатор давления модели ИП-1 (рис.2.133г) имеет эластичную мембрану 1 с окрашенными лепестками 2. Под действием давления мембрана прогибается и прижимает лепестки 2 к прозрачной линзе 3, что и сигнализирует о наличии давления. Сферическая линза обеспечивает хороший обзор индикатора как спереди, так и с боков. При отсутствии давления мембрана с лепестками возвращается в исходное положение под действием упругих сил ее материала.
Величины параметров гидропневмосистем часто контролируют с помощью различного рода датчиков, позволяющих их сигнал использовать непосредственно для управления этими системами.
Величину давления обычно контролируют датчиками давления. Они могут быть проточными и непроточными (глухими) и использовать для измерения давления различные физические эффекты: изменение силы тока, магнитной индукции и т.д.
На рис.2.134 показаны датчики давления тензометрического типа. Торец датчика 2 глухого типа (рис.2.134а) выполнен в виде мембраны 3, на котором наклеены тензометры (электрические сопротивления, изменяющие свою величину при деформации) 4. Устанавливается датчик в канал 1 с рабочей средой, давление которой необходимо проконтролировать. Под действием давления Р мембрана с тензометрами деформируется, вследствие чего меняется сопротивление и ток, проходящий через них. Подсоединяемые к тензометру провода 5 собираются в жгут 6 и подключаются к усилительной и другой аппаратуре, с помощью которой можно по выданному датчиком сигналу управлять работой гидравлической или пневматической системы.

Рис. 2.134. Датчики давления: а - непроточного (глухого) типа, б - прочного типа
Отличие тензометрического датчика давления проточного типа (рис.2.134б) состоит в том, что мембраной 3 датчика 2 служит часть его корпуса, выполненная в виде тонкой стенки, чувствительной к изменению давления Р.
Применив записывающую аппаратуру (например, осциллограф), можно получить картину изменения давления в исследуемом участке гидропневмосистемы в течение всего времени ее работы.
Датчики температуры (рис.2.135) выдают командный сигнал при достижении температуры природной среды заданной величины. Устроен он следующим образом. В термобаллоне 4 находится наполнитель, чувствительный к изменению температуры, что выражается ростом или падением давления. Изменение давления воспринимается сильфоном 3, который при росте давления своим штоком воздействует на микропереключатель 1. Последний и выдает командный сигнал о достигнутой величине температуры рабочей среды. С помощью пружины 2 можно настроить (изменяя ее натяг) необходимый предел температуры, при которой сработает датчик.
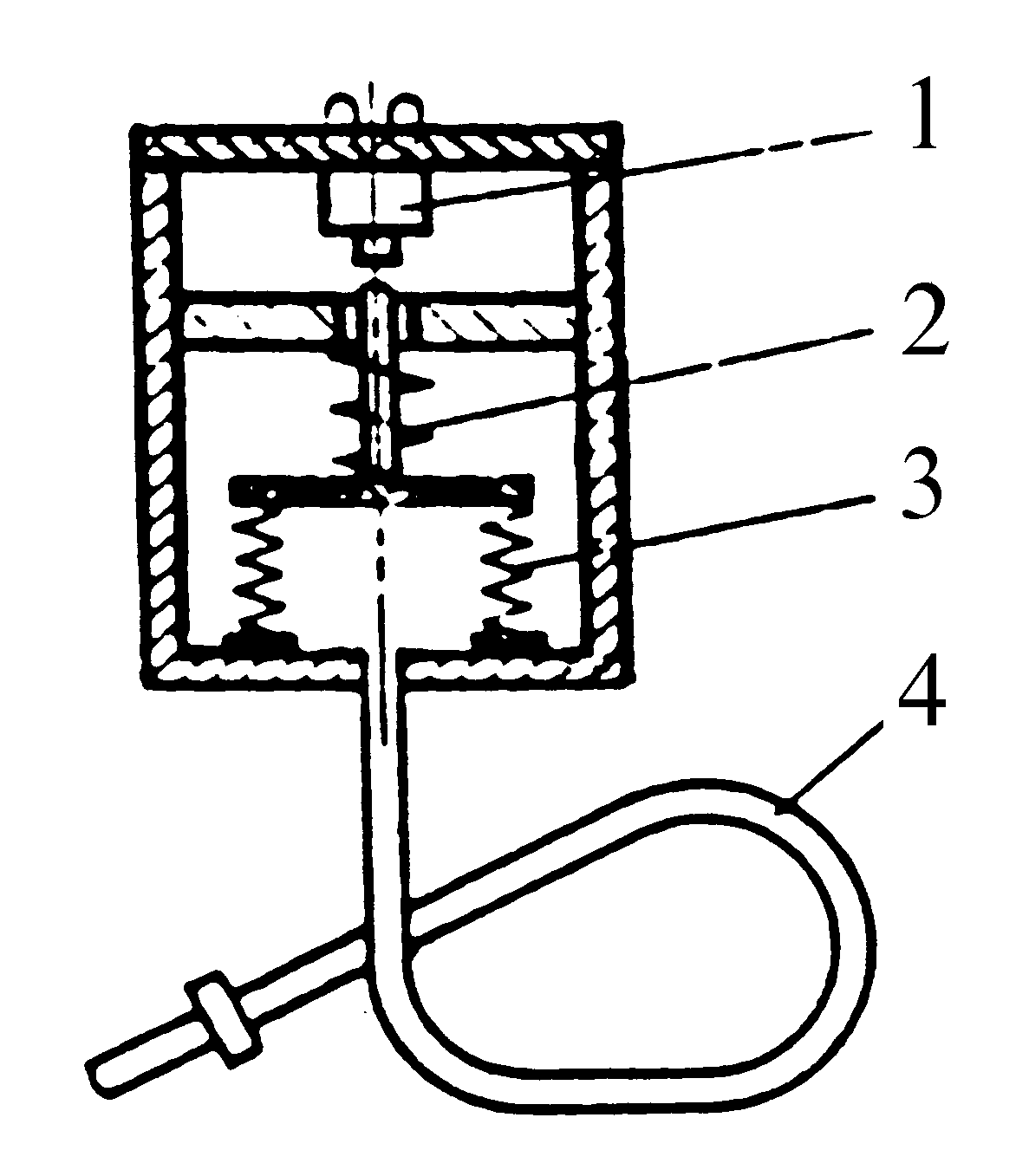
Рис.2.135. Датчик температуры модели ртп-1
Для измерения расхода рабочей среды используются расходомеры, принцип действия которых может быть построен на различных физических явлениях. Так, ротаметры (рис.2.136а) имеют поплавок 2, который под действием струи рабочей среды поднимается тем выше, чем больше ее расход, что фиксируется шкалой 3. Сам ротаметр 1 представляет собой стеклянный конический стакан (трубку) с расширяющимся вверх конусом. Таким образом, сила веса поплавка уравновешивается динамической силой потока рабочей среды.
Недостаток ротаметров - ограниченная область применения из-за необходимости осторожного обращения, только вертикальной установки и зависимости длины трубки от величины расхода. Большое распространение получили расходомеры турбинного типа (рис.2.136б). Принцип действия основан на зависимости частоты вращения турбинки 2 от величины расхода Q. Вращение турбинки через шестерни 3 передается на тахогенератор 4, выдающий на выходе силу тока, пропорциональную расходу жидкости. Такой расходомер можно устанавливать непосредственно в трубопровод 1 с рабочей средой.

Рис.2.136. Принципиальные схемы расходомеров: а - ротаметра, б - турбинного типа
Для того, чтобы произвести изменение направления потока рабочей среды, останов или пуск двигателя через некоторый промежуток времени после подачи управляющего сигнала применяют реле времени, называемые клапанами выдержки времени. Они бывают объемного или дроссельного типа. Принцип их действия и устройство показаны на рис.2.137а, б, в, г .
Если распределитель типа 3/2 находится в верхней позиции (рис.2.137а), то рабочая среда через обратный клапан поступает в штоковую полость цилиндра 1, поршень которого 2 поднимается вверх до максимального сжатия пружины 3. Клапан выдержки времени объемного типа готов к работе. Если теперь по сигналу, пришедшему на электромагнит распределителя, он выключится, распределитель займет нижнюю позицию и соединит штоковую полость цилиндра с баком (или атмосферой для пневматических систем). Под действием пружины поршень начнет вытеснять рабочую среду из цилиндра. Контакты 5 переключатся лишь тогда, когда поршень опустится вниз, то есть через промежуток времени, зависящий от хода поршня, а он настраивается винтом 4. В клапанах такого типа объем W переменный. Сопротивление демпфера R и скорость перемещения поршня v постоянны.
Конструкция клапана выдержки времени объемного типа, предназначенного для осуществления реверса двигателя, приведена на рис.2.137в.
Рабочая среда поступает в клапан по каналу А и воздействует на левый торец плунжера 2 распределителя типа 5/2. Вследствие этого плунжер 2 занимает крайнее правое положение и изменяет направление потоков рабочей среды, проходящей через него. С этого момента начинается отсчет времени выдержки реверсивного движения. Вместе с этим, рабочая среда проходит через демпфер 1 и заполняет левую полость Б цилиндра. По мере ее заполнения нарастает давление у правого торца плунжера 2, имеющего большую площадь, чем левый торец. Как только сила, создаваемая этим давлением при воздействии на правый торец плунжера 2, преодолевает силу слева, плунжер распределителя сместится влево и вновь произведет реверс потока рабочей среды на первоначальное. Таким образом, время выдержки до реверса определяется объемом полости Б, которую можно изменять перемещением поршня 3. Для этого необходимо вращать винт 4 с помощью колпачка 5.

Рис.2.137. Клапаны выдержки времени: а - принцип действия клапана объемного типа, б - принцип действия реле времени дроссельного типа, в - конструктивная схема реле времени объемного типа модели ЗИЛ, г - конструктивная схема клапана выдержки времени дроссельного типа разработки ЭНИМС
В клапанах выдержки времени дроссельного типа настройка времени осуществляется дросселем за счет изменения его сопротивления R (рис.2.137б). Объем поршневой полости W не меняется. При этом скорость движения поршня будет переменной, зависящей от сопротивления R. Отсчет времени начинается с момента переключения распределителя типа 3/2 в нижнюю позицию (как показано на рис.2.137б).
Конструктивно реле времени дроссельного типа показано на рис.2.137г. В обычном состоянии клапана, когда не нужна выдержка времени, сжатый воздух из подводящего канала П в крышке 1 не может пройти на выход в канал отвода О, поскольку затвор 2 поджат пружиной 14 к втулке 3. Канал О при этом связан через центральные отверстия в толкателе 10 с атмосферой по каналу А. При подаче командного сигнала в управляющий канал У в крышке 1 сжатый воздух поступает в полость б, а оттуда по каналу Г в полость д над мембраной 9. Под действием давления она прогибается вниз и перекрывает выход в атмосферу воздуха из полости в по каналу А1. Одновременно с этим воздух из канала У проходит фильтр 4, игольчатый дроссель 7 и попадает в полость в над поршнем 6. Давление сжатого воздуха здесь начинает нарастать. Когда сила, создаваемая этим давлением на поршень сверху, преодолевает силу от давления на поршень снизу и силу пружины 13, поршень начинает смещаться вниз. Как только затвор 12 отрывается от седла 11, то полость б через канал А соединяется с атмосферой. Давление под поршнем снижается до нуля, а сам поршень быстро перемещается вниз. Манжета 5 садится на седло 11 сверху, закрывая связь полости б с атмосферой. Толкатель 10 своим торцом упирается в затвор 2, закрывая связь канала О с каналом А (и атмосферой), и перемещает затвор 2 вниз, сжимая пружину 3. При этом сжатый воздух из канала П начинает проходить в канал О. Такое состояние клапана сохраняется все время, когда есть командный сигнал в канале У. Как только этот сигнал снимается, мембрана 9 возвращается вверх, соединяя надпоршневую полость в с атмосферой через канал А1. Поэтому под действием пружины 13 поршень 6 возвращается назад, а затвор 2 поднимается пружиной 14 к втулке 3. При этом канал П запирается, а канал О соединяется с каналом А и атмосферой.
Анализируя работу этого реле, нетрудно заметить, что пропуск сжатого воздуха из канала П в канал О начинается через некоторый промежуток времени после команды У, настраиваемый перемещением игольчатого дросселя 7 за счет вращения винта 15. Чем больше будет сопротивление дросселя 7, тем больше будет выдержка времени до начала подачи сжатого воздуха в отводной канал О.
