









Гидравлические моторы
Наша компания предлагает надежную и доступную по цене альтернативу гидравлическим моторам зарубежных производителей, таких как Hagglunds Drives, Poclain, Bosch Rexroh, SAI, Kawasaki, Brevini, Sauer Danfoss, которую Вы можете купить в России за рубли. В текущем каталоге осуществляется продажа аксиальных и радиальных поршневые гидродвигателей, а также вы можете купить комбинации аксиально-поршневых насосов с планетарными редукторами. Которые применяются в дорожно-строительной, карьерной и другой спецтехники. Стоимость предлагаемого оборудования в рублях значительно ниже цены европейских аналогов. Доставка товара осуществляется по все территории РФ. Если товара нет в наличии, то минимальный срок его поставки может составлять 5 недель.
Для того, чтобы понять для чего нужен гидромотор, необходимо провести его сравнение с механическим приводом. При прямом приводе гидромотор заменяет редуктор, работающий в паре с электродвигателем и системой управления. Электродвигатель и шкаф управления необходимы для обоих типов приводов. Регулирование скорости электродвигателя с редуктором дорого в реализации, а передаточное число редуктора постоянно. Гидропривод при постоянной частоте оборотов электродвигателя позволяет регулировать передаточного отношения насос/мотор.

Крутящий момент гидромотора измеряется в ньютон-метрах (нм) и равен Сила x Плечо. Для понимания мощности и величин основных технических характеристик гидравлического двигателя можно провести представить себе следующую ситуацию, если человек весом 100 кг повернет рычаг длиной 1000 метров, то он получит момент силы равный 1 000 000 Нм.
Далее описаны основные технические параметры гидромотора, которые важны для согласования при покупке и продажи. Крутящий момент в гидросисистеме, которую питает гидронасос, создается нагрузкой. Давление в гидравлической системе зависит от Типоразмера гидродвигателя и его Крутящего момента. Потребляемый расход от гидронасосов, в свою очередь зависит от Требуемой скорости вращения, необходимой промышленной и дорожной техники и Типоразмера гидромотора. Номинальная скорость гидродвигателя - это максимально допустимая скорость вращения при давлении подпора гидромотора в 12 бар. Максимальная скорость - это максимально допустимое количество оборотов гидравлического двигателя. Специальная величина скорости вращения необходимая при режимах работы с малым давлением подпора – при охлаждении или при работе гидросистемы с частотой оборотов выше номинальной. Максимальное давление для предлагаемых гидромоторов составляет 350 бар. Пиковое давление, оно же испытательное, составляет 420 бар.
Прямой работающий гидравлический привод не требует без бетонного основания, гидромуфты или редуктора. Компактная конструкция, малый вес, малые габаритные размеры позволяют получить малый момент инерции и мгновенное ограничение крутящего момента. Возможность достижения высокого пускового момента обеспечивает неограниченное количество пусков и стопов без перегрева работающего электродвигателя. Запуск электродвигателей, приводящих в движение гидронасосы, осуществляется без нагрузки и поочередно.
В интернет-магазине www.hydrootvet.ru, помимо каталога, в котором Вы можете купить гидромотор по доступной цене, в разделе про Гидравлику (https://www.hydrootvet.ru/blogs/info) подробно описаны конструкции гидравлических двигателей и насосов, их технические характеристики и принцип работы. Ниже даны технические особенности гидромоторов, на которые следуют обратить внимание покупателю при выборе, если он хочет купить данный вид оборудования, согласно каталогу на нашем сайте.
|
Покупайте гидравлический мотор, который имеет следующие достоинства |
Продавайте следующее преимущества, которые важны для Заказчика при покупке гидропривода для вращательного движения |
|
Мгновенное ограничение крутящего момента при ударных нагрузках |
|
|
Большой крутящий момент при малых оборотах. |
|
|
Работа привода в 4-х квадратах зависимости крутящего момента от скорость вращения |
|
|
Обратимый привод (регенеративный) |
|
|
Пуск электродвигателя без нагрузки |
|
|
Большой крутящий момент при малой скорости вращения |
|
|
Неограниченное число пусков/стопов |
|
|
100% распределение нагрузки |
|
|
Отличные возможности резервирования |
|
|
Без оснований, редукторов и гидромуфт |
|
|
Малый дополнительный момент сопротивления при внезапном останове |
|
|
Высокий пусковой момент |
|
|
Хорошая загрузка оборудования |
|
На нашем сайте вы можете заказать пластинчатые (героторные), аксиально-поршневые гидромоторы с необходимым объемом, а также аналоги известных производителей, запчасти по выгодным ценам и доставкой по всей России и странам СНГ. Чтобы купить гидромоторы, достаточно оставить заявку на нашем сайте. На складе представлен широкий ассортимент гидроагрегатов с гарантией. Доступны разные способы оплаты.
Типы, конструкции и принцип действия гидравлических исполнительных двигателей
Гидравлические двигатели вращательных движений называются гидромоторами. Они бывают шестеренного (роторно-зубчатого), роторно-пластинчатого и роторно-поршневого типов. Конструктивно они аналогичны соответствующим типам насосов и в большинстве случаев взаимно обратимы, т.е. насос может работать в режиме мотора, а мотор – в режиме насоса.
На рис.2.62 показана конструктивная схема шестеренного гидравлического мотора, в котором валы шестерен 3 и 4 расположены в плавающих опорах скольжения 1, 2, 5 и 6. Подвод рабочей жидкости в напорную полость мотора осуществляется по каналам в крышке 7. Принцип действия шестеренного гидромотора можно проиллюстрировать на схеме шестеренного насоса (рис.2.4), заменив всасывающий трубопровод 4 напорным. По нему рабочая жидкость подводится в полость А, там она воздействует на боковые поверхности зубьев шестерен, находящихся в этой полости, и создает крутящий момент, приводящий во вращение обе шестерни. При этом под действием давления Р возникают значительные радиальные силы, прижимающие валы к их опорам и приводящие к их повышенному износу (это явление описано в разделе 2.2.1 и показано на рис.2.8). К тому же затрудняется запуск такого гидромотора, находящегося под нагрузкой. Поэтому для снижения этих отрицательных явлений рекомендуется применять гидростатические опоры или уплотнения в виде эластомеров 8 (рис.2.62), которые создают эффект пружины и снижают износ опор и крутящий момент при пуске двигателя.
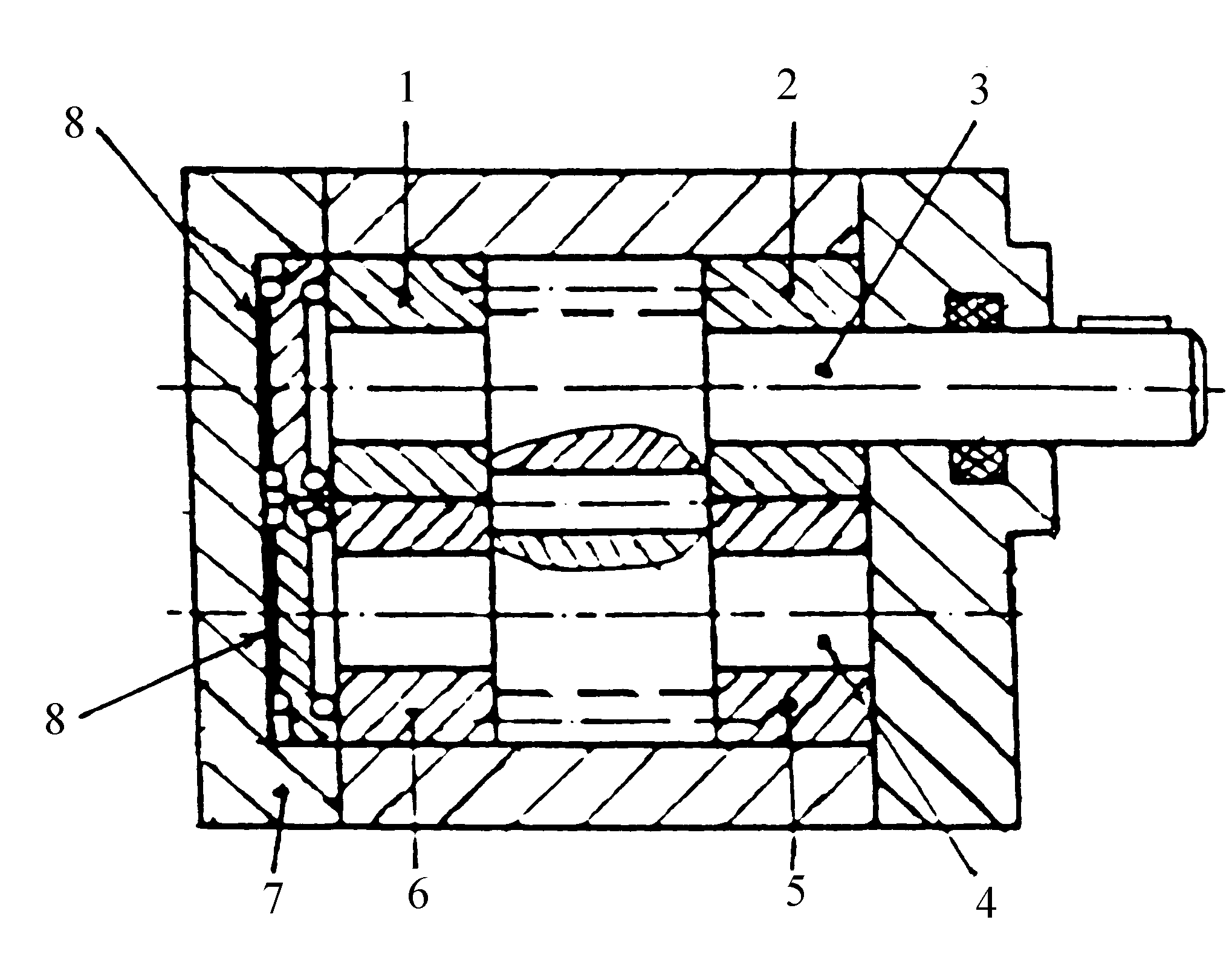
Рис.2.62. Конструктивная схема шестеренного гидромотора
Величина крутящего момента Mвр, развиваемого любым гидромотором, зависит от разности давлений на нем и рабочего объема гидромашины v0 и определяется по формуле: Mвр = v0 (P 1 — P2 )/2π
= 0,159v0(P 1 — P2), где P 1 и P 2- давления соответственно на входе и выходе гидромотора.
Наиболее широко из шестеренных гидравлических двигателей применяются героторные гидромоторы благодаря тем замечательным свойствам, которые описаны в разделе героторных насосов. На рис.2.63 показана конструктивная схема такого гидромотора, обеспечивающего получение высоких крутящих моментов при небольших своих габаритных размерах. Рабочая жидкость с расходом Q подается в гидромотор по каналу П в корпусе 2. Проходя специальные проточки распределительной втулки 7, она попадает в рабочие полости мотора Р. В них создается крутящий момент, приводящий во вращение зубчатый ротор 4, который начинает совершать планетарное движение, обкатываясь по роликам 6 обоймы 5. Вращение ротора 4 с помощью карданного вала 3 передается валу 1 гидромотора. Вместе с ним вращается и распределительная втулка 7, соединенная с валом 1 штифтом 8 , благодаря чему осуществляется подвод жидкости в рабочие полости мотора, соответствующие положению ротора 4. Героторные гидромоторы отличаются высокой энергоемкостью, возможностью работы при давлениях до 25 МПа. Рабочий объем таких машин достигает 500 см3, а развиваемый вращающий момент - до 1000 Нм.
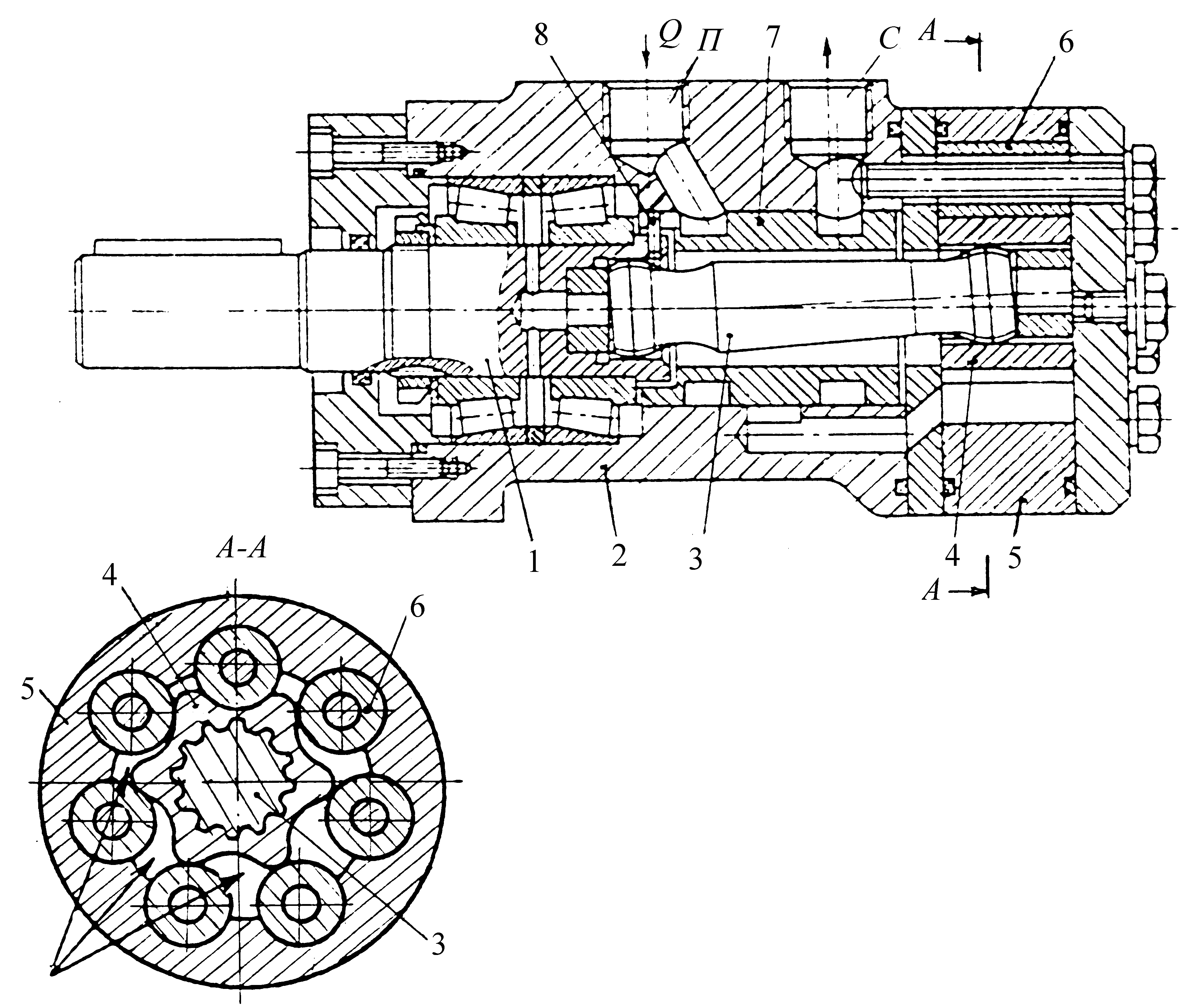
Рис.2.63. Героторный гидромотор фирмы Herion
Среди роторно-пластинчатых гидромоторов наибольшее применение находят радиально-пластинчатые и ролико-пластинчатые моторы. Показанный на рис.2.64 радиально-пластинчатый гидромотор представляет собой гидравлическую машину двукратного действия. Внутренняя поверхность статора 7 в поперечном сечении имеет форму овала, вследствие чего мотор имеет две напорные полости, соединенные с подводящим рабочую жидкость каналом П, и две сливные полости, соединенные с выходным каналом С. Жидкость проходит в напорные полости статора через серповидные канавки в распределительном диске 8, воздействует на пластины 6, установленные в пазах ротора 3, и создает вращающий момент на роторе. Он начинает вращаться вместе с валом 1, установленном на подшипниках в корпусе 2. Слив жидкости происходит через серповидные канавки в распределительном диске 5 в канал С. Благодаря наличию в моторе двух противоположно расположенных напорных полостей, вал 1 разгружен от радиальных сил давления рабочей среды, что снижает износ и повышает долговечность гидромотора.
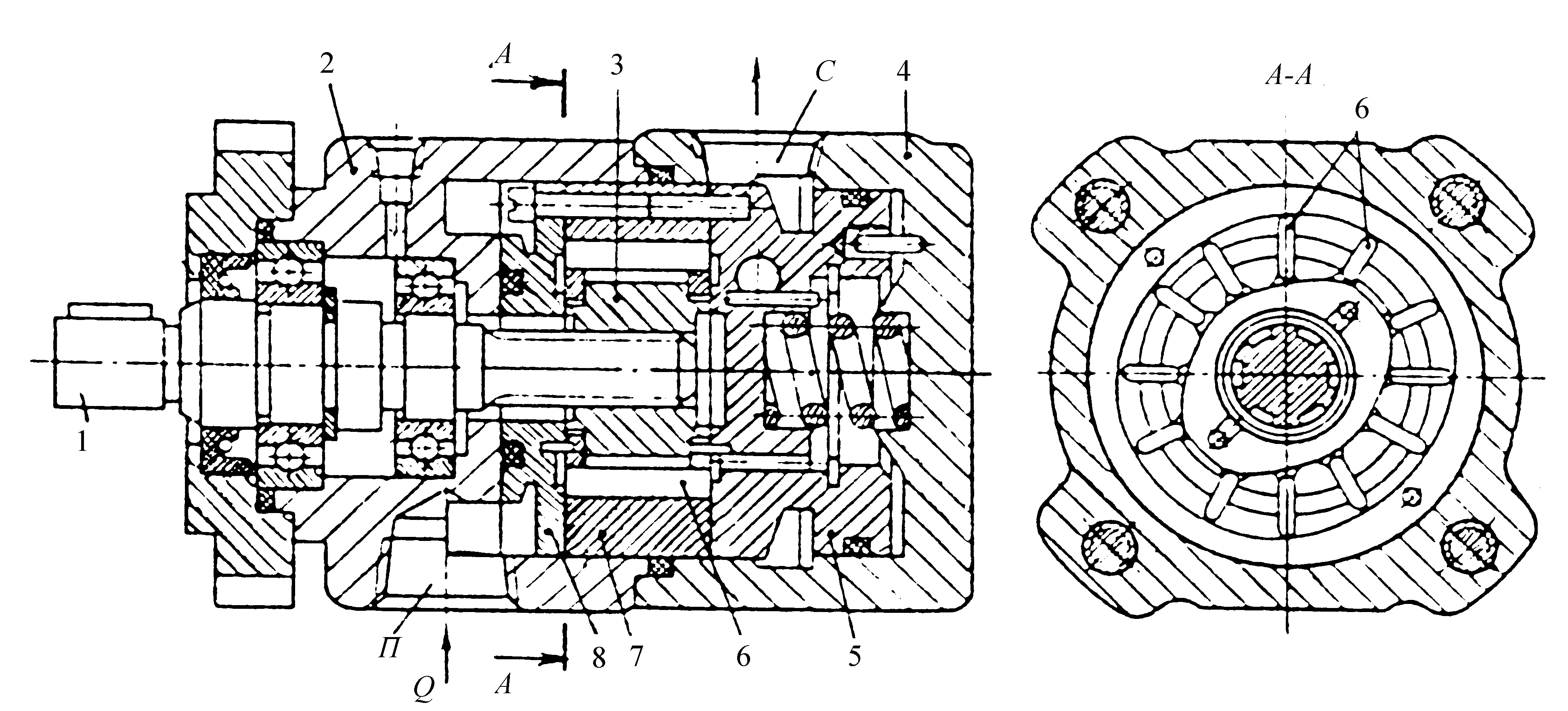
Рис.2.64.
Ролико-пластинчатый гидромотор (рис.2.65) выгодно отличается тем, что может развивать значительно большие крутящие моменты, чем радиально-пластинчатые. В его роторе 5 жестко установлены шесть пластин, воспринимающих воздействие рабочей жидкости, подаваемой по каналам Ï, выполненным в корпусе 6. По каналам П осуществляется слив жидкости из гидромотора. Разъединение напорной и сливной полостей обеспечивают четыре ролика 4, синхронно вращающихся с ротором 5 благодаря зубчатой передаче 3, установленной в крышке 2 и связывающей вращение ротора и роликов.
Широкое применение получили аксиально-поршневые гидромоторы как нерегулируемые, так и регулируемые. Благодаря работе своих плунжеров на сжатие, они обеспечивают получение значительных по величине вращающих моментов, достигающих 6000 Нм, и частот вращения до 8000 1/мин.
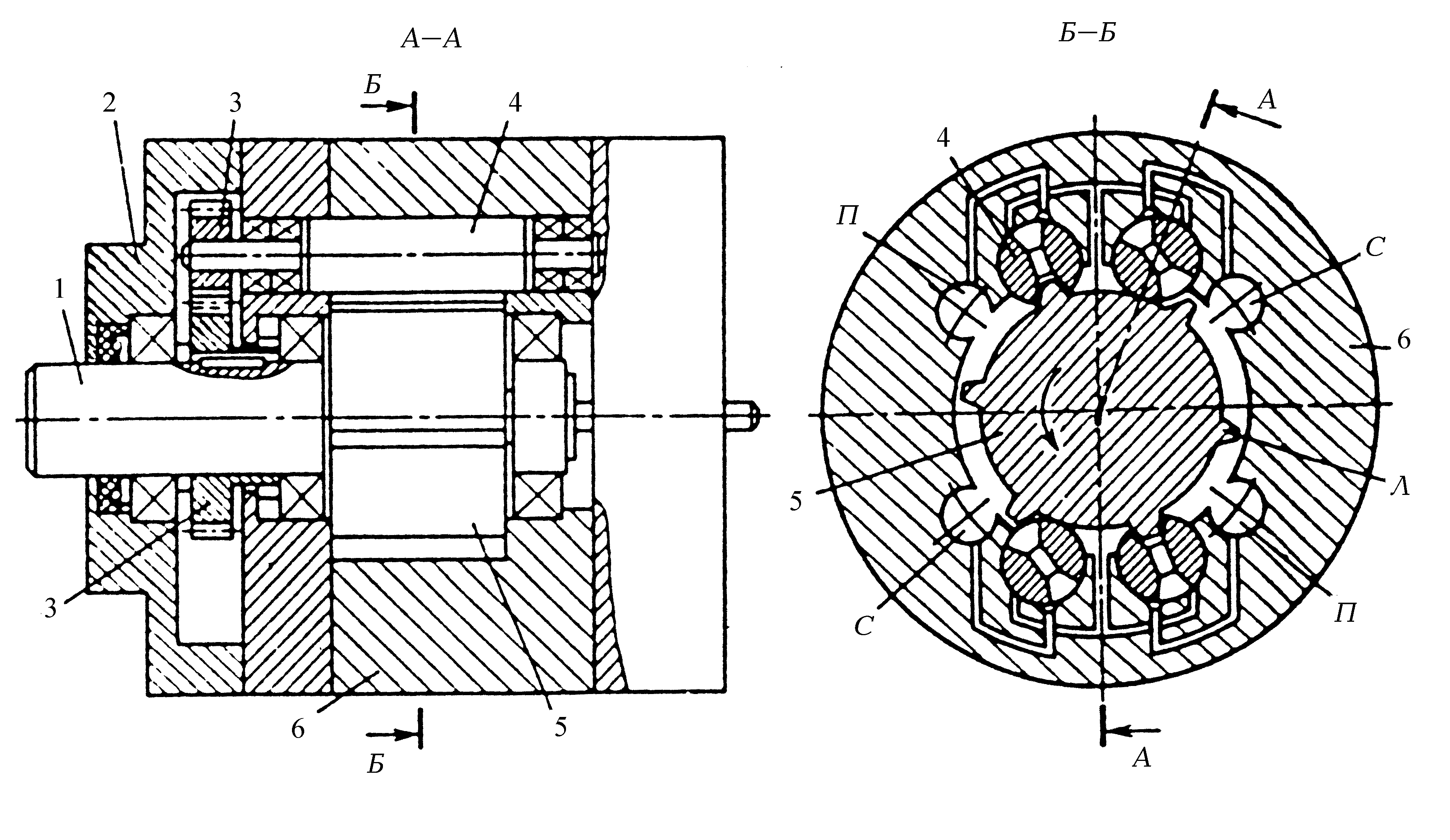
Рис.2.65. Роликово-пластинчатый гидромотор
На рис.2.66 показан отечественный аксиально-поршневой гидромотор модели Г15. При подаче жидкости в гидромотор по каналу А или Б в крышке 6 она попадает через серповидные канавки В в напорную полость П, действует на поршень 7 и через него на плунжер 9. Последний, выдвигаясь, воздействует на наклонную планшайбу 2 в виде упорного подшипника, вследствие чего создается тангенциальная сила, вращающая плунжерный блок 8 и через поводок 4 ротор 5 с валом 1. Пружина 3 поджимает ротор 5 к торцу крышки 6, что особенно важно для создания надежной герметизации стыка во время пуска мотора. Регулируемые гидромоторы дают возможность изменять частоту вращения выходного вала за счет изменения рабочего объема самой гидромашины. Возможны различные варианты конструктивных решений задачи изменения рабочего объема. Так, на рис.2.67а показан регулируемый гидромотор, у которого предусмотрена возможность поворота планшайбы 4 на некоторый угол. При подаче жидкости по каналу А к плунжерам 2 последние давят на наклонную планшайбу 4 через подпятники 3, вследствие чего возникает окружная сила, действующая через плунжеры 2 на блок 1 и приводящая его во вращение. слив жидкости из цилиндрового блока осуществляется по каналу Б. Если будет равен нулю, т.е. торец планшайбы 4 будет перпендикулярен оси вращения плунжерного блока 1, то плунжеры 2 не смогут совершать возвратно-поступательные движения, рабочий объем мотора и частота вращения будут равны нулю.
Пружина 6 обеспечивает поджим плунжерного блока 1 к распределительному диску 8 при запуске мотора. Планшайба может поворачиваться на угол от — αmax до +αmax. Поэтому такой регулируемый гидромотор называют реверсивным, т.к. он изменяет направление вращения выходного вала.
Другой вариант конструктивного решения изменения рабочего объема гидромотора представлен на рис.2.67б. Регулирование частоты вращения гидромотора производится поворотом на угол от — αmax до +αmax люльки 4 с плунжерным блоком 2, с поршнем 5, штоками 7 и распределительным диском 3, к которому жидкость подводится через цапфы люльки в крышке 1 (на рис.2.67б не показаны). Под действием возникающей от работы поршней тангенциальной силы вращается выходной вал 8, установленный на подшипниках в корпусе 9.
Такое многообразие рассмотренных конструкций гидравлических моторов показывает, что при выборе какого-либо типа для конкретного привода следует учитывать многие факторы. Главным из них являются величина крутящего момента на выходном валу и частота его вращения. Зная эти значения (а они задаются заказчиком при проектировании гидравлической системы или рассчитываются, исходя из условий работы привода), можно по каталогу выбрать несколько гидромоторов различного принципа действия, но имеющих одинаковые параметры по вращающему моменту и частоте вращения. Далее следует анализировать другие факторы, такие как коэффициент полезного действия гидромашины, шумовая характеристика, весовая характеристика, способ монтажа (фланцевый или на лапах), требования к регулированию частоты вращения вала, давление, при котором могут работать выбранные двигатели, величина рабочего объема и габариты гидромотора, пределы изменения частот и ряд других.
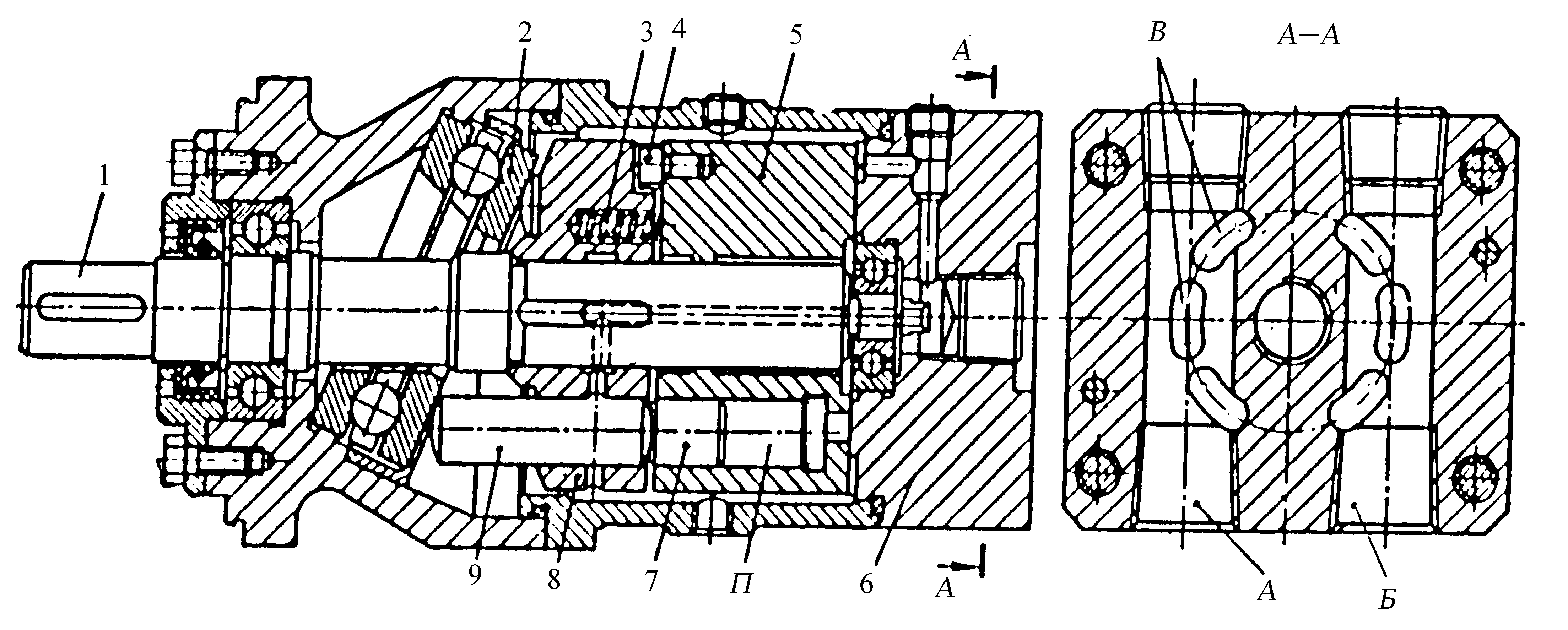
Рис.2.66. Нерегулируемый аксиально-поршневой гидромотор модели Г15
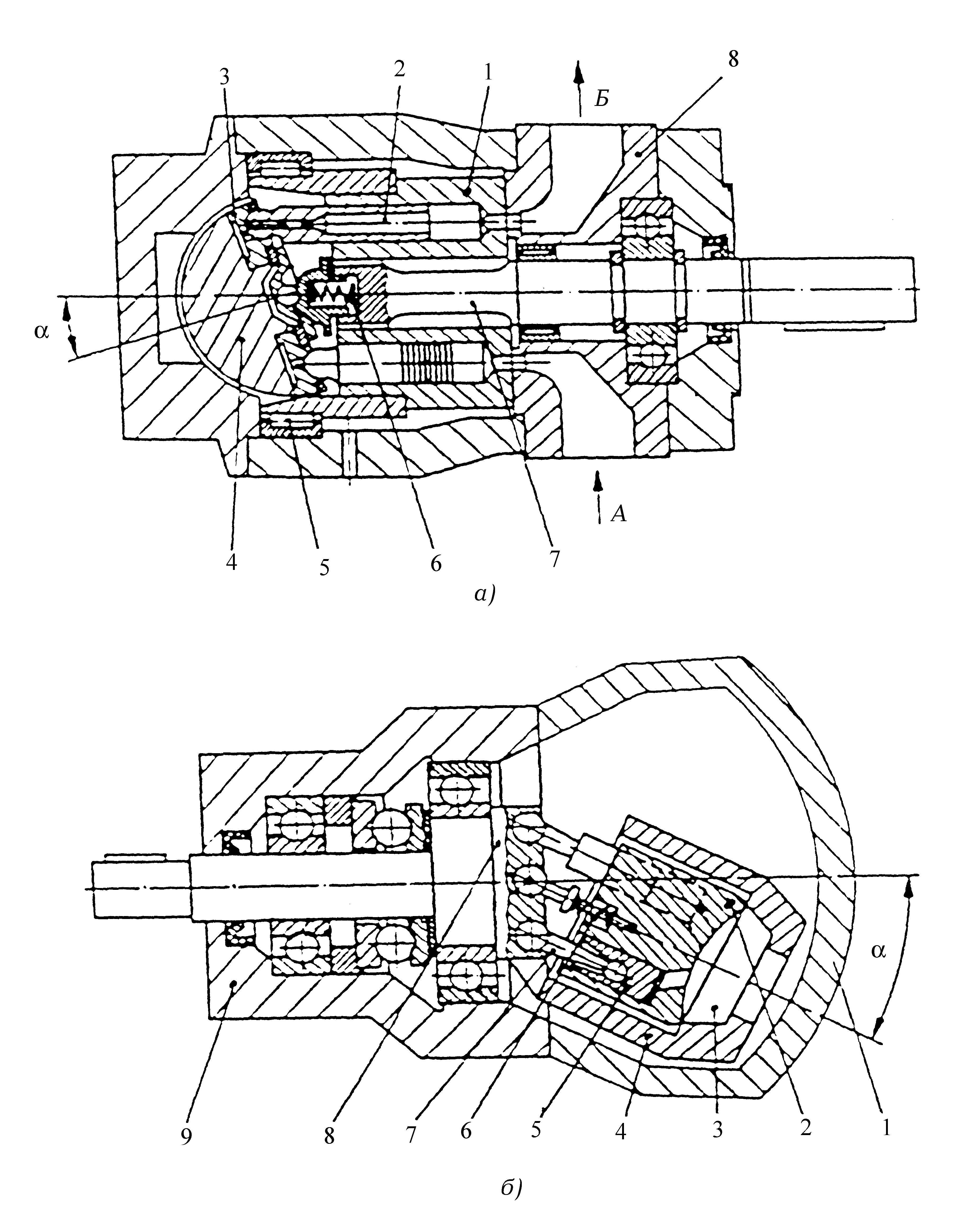
Рис.2.67. Регулируемые аксиально-поршневые гидромоторы: а – с поворотной планшайбой, б – с поворотным плунжерным блоком
Проанализировав соответствие выбранных гидромоторов условиям работы по всем параметрам, останавливают свой выбор на конкретной модели гидромотора, наиболее полно отвечающего всем требованиям. При этом записываются рабочий объем гидромотора, его коэффициент подачи и полный коэффициент полезного действия, пределы частот вращения, момент инерции вращающихся масс.
Выбрав определенный тип гидромотора, можно теперь определить и необходимое для работы гидромотора давление жидкости Pм и его расход Qм, используя известные формулы для вращающего момента гидромашин и расхода гидромотора Qм:
Pм = 2πMвр/v0 и Qм = nмv0,
где Mвр- вращающий момент на валу гидромотора, v0 - рабочий объем гидромотора, nм - частота вращения выходного вала мотора.
Полученные значения Pм и Qм используются для дальнейших расчетов по выбору насосной станции.
Для осуществления возвратно-поступательных перемещений в гидравлических приводах используются гидравлические двигатели, называемые гидроцилиндрами.
Устройство гидравлического цилиндра показано на рис.2.68. Его основными элементами являются гильза 2, поршень 3, шток 4 и крышки 1 и 5. Подвод и отвод рабочей жидкости осуществляется по каналам А и Б, к которым подсоединяются трубопроводы.
Если подать жидкость по каналу А, то она, воздействуя на поршень 3, сместит его со штоком вправо. Для возврата поршня влево жидкость подается в канал Б, а канал А в это время соединяется со сливным трубопроводом. Так осуществляется возвратно-поступательное движение поршня на наибольшую длину, определяемую расстоянием от правого торца поршня 3 до торца крышки 5. Длина хода гидроцилиндра может достигать нескольких метров.
Для герметизации внутренних полостей гидроцилиндров устанавливаются уплотнения 7 и 10. Для предотвращения попадания внутрь цилиндра грязи при его работе в крышке 5 устанавливается уплотнение - грязесъемник 6. Крепится такой цилиндр на кронштейнах 9 и 11 с помощью установочных полуколец 8 и гайки 12.
Подводящие жидкость каналы могут выполняться в различных вариантах. В рассмотренном цилиндре один канал сделан в крышке цилиндра 1, а другой в гильзе цилиндра 9.
В соответствии с функциональным назначением гидравлические цилиндры могут быть двустороннего и одностороннего действия. Это означает, что в первом случае гидроцилиндр может преодолевать внешнюю нагрузку при движении в обе стороны. Цилиндры одностороннего действия преодолевают внешнюю нагрузку лишь при движении в какую-либо одну сторону. Конструктивно гидравлические цилиндры могут быть изготовлены как с одним штоком (рис.2.68), так и с двумя штоками (рис.2.69). В таком случае цилиндры называют гидроцилиндрами с односторонним или двусторонним штоком. Основными характеристиками гидравлических цилиндров являются тянущая и толкающая сила F, развиваемая таким гидродвигателем, его ход L и размеры (диаметры цилиндра D и штока d). Тянущая сила цилиндра – это сила, развиваемая им при втягивании штока в цилиндр. Толкающая сила–это сила, создаваемая гидроцилиндром при выдвижении его штока.
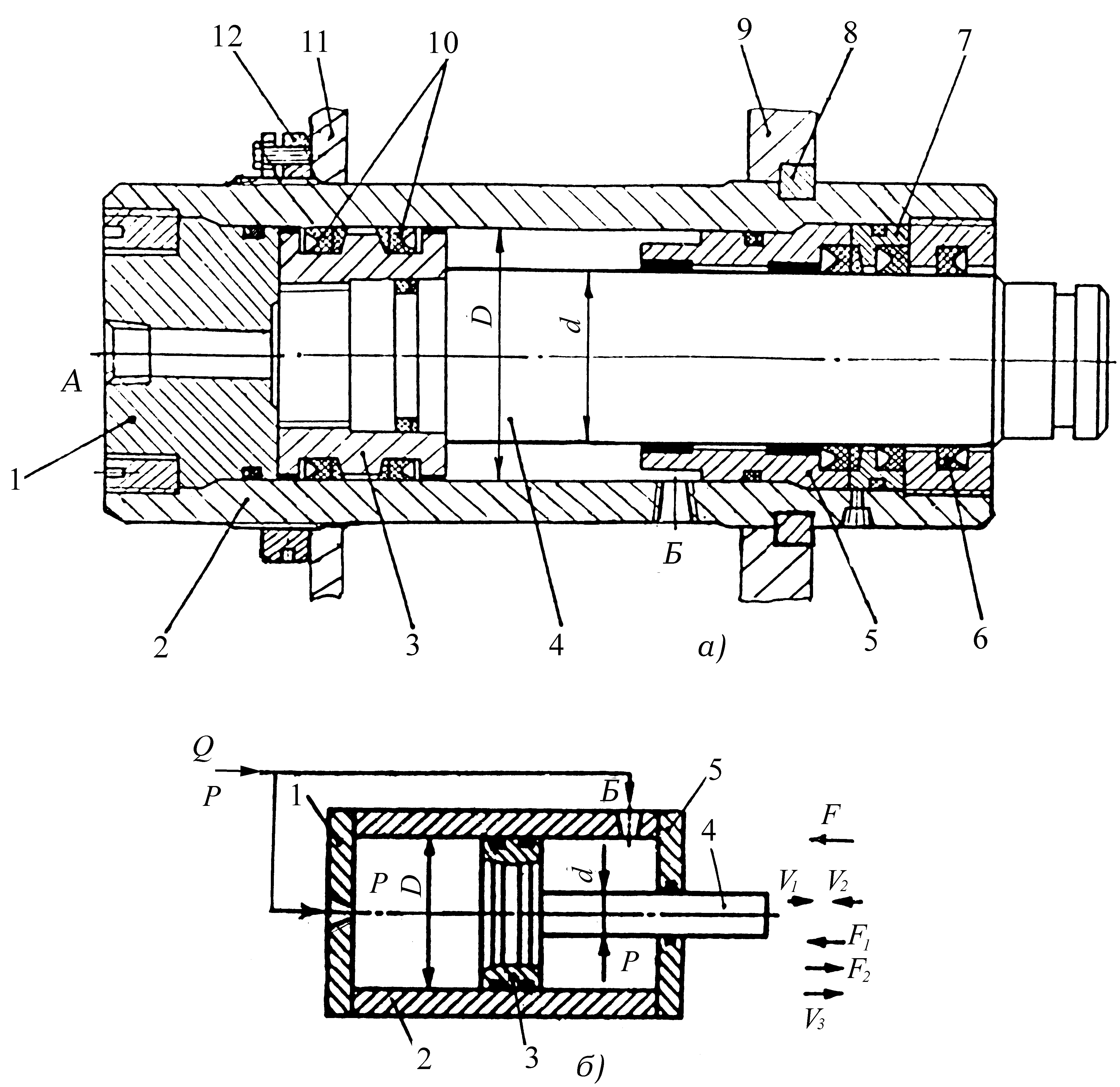
Рис.2.68. Гидроцилиндр по ОСТ2-КП-2-79: а – устройство; б – конструктивная схема
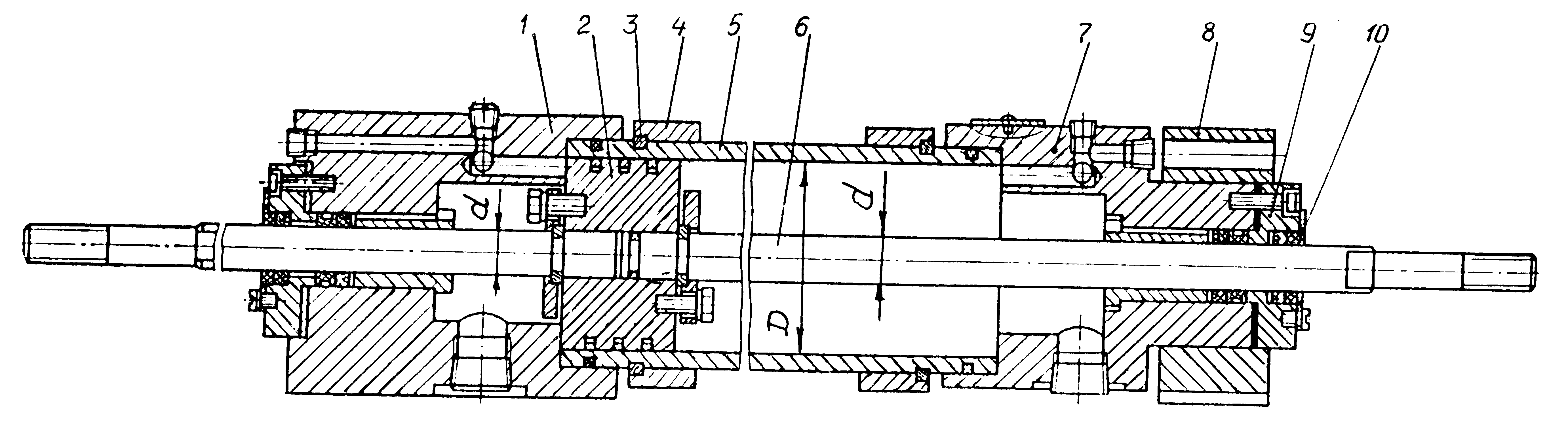
Рис.2.69. Гидроцилиндр с двухсторонним штоком
Для цилиндров двустороннего действия с односторонним штоком (рис.2.68) эти силы при одном и том же давлении получаются разными, поскольку разными являются эффективные площади его рабочих полостей:
Fтян = Pπ(D2 - d2)/4; Fтолк = PπD2/4.
Скорости движения штока цилиндра также зависят от эффективных площадей полостей цилиндра и от величины потока жидкости Q, поступающей в цилиндр. Для цилиндров с двусторонним штоком скорости выдвижения и втягивания будут одинаковы:
V=4Q/[π(D2-d2)].
Для цилиндров с односторонним штоком (рис.2.68б). Эти скорости будут разными: выдвижения V1 = 4QπD ; втягивания V2 = 4Q/[π(D2-d2)].
Такие цилиндры часто называют дифференциальными, поскольку имеют разные эффективные площади рабочих полостей и дают возможность дифференциального подключения к источнику энергии. Оно подразумевает одновременное соединение обеих полостей цилиндра к напорному трубопроводу (рис.2.68б). Тогда в обеих полостях цилиндра устанавливается одинаковое давление P, но, благодаря разным рабочим площадям, поршень испытывает на себе действие разных сил от этого давления. Поэтому шток будет выдвигаться из цилиндра со скоростью V3 = 4Q/πD , преодолевая силу F = PπD /4.
Нетрудно заметить, что эта скорость больше, чем скорость выдвижения при подаче жидкости только в бесштоковую полость.
Это свойство дифференциального цилиндра часто используется для реализации цикла работы «быстрый подвод» (выдвижение при дифференциальном включении) - «рабочий ход» (выдвижение в ту же сторону при обычной подаче жидкости в бесштоковую полость) - «быстрый отвод» (втягивание штока при подаче жидкости в штоковую полость).
Если подобрать диаметры поршня D и штока d такими, что d≈0,707D, то скорости быстрого подвода и быстрого отвода будут равны и в два раза больше скорости рабочего хода (при таком соотношении диаметров эффективная площадь бесштоковой полости гидроцилиндра в два раза больше площади штоковой полости).
Отличительной особенностью гидроцилиндра двустороннего действия с односторонним штоком, показанном на рис.2.70, является предотвращение жесткого удара поршня 3 о крышку цилиндра 5 и 9 в конце его хода с помощью установленных на штоке 2 демпферной втулки 8 и плунжера с пружиной 6 в крышке 5. При движении влево в конце хода демпферная втулка 8 входит в расточку крышки 9 и вытесняет из нее жидкость через цилиндрический зазор, чем гасится скорость поршня и обеспечивается плавная остановка. При движении вправо в конце хода торец штока с гайкой 4 упирается в выдвинутый плунжер 6 и, сжимая пружину, плавно тормозится.
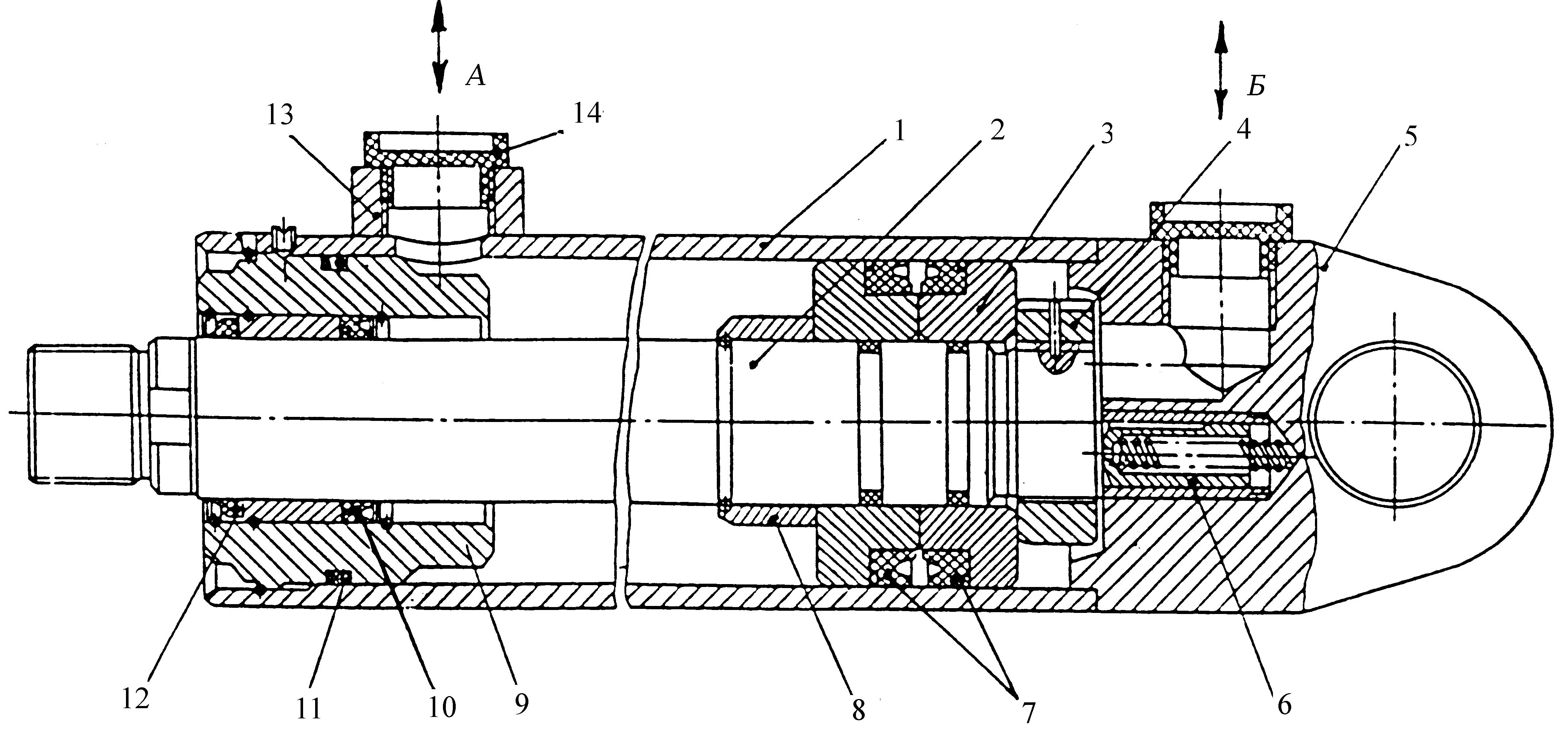
Рис.2.70. Гидроцилиндр модели ГЦ04
В цилиндре двустороннего действия с односторонним штоком 4 (рис.2.71), разработанным Ковровским СКБ приборостроения и автоматики, для удобства его монтажа подвод жидкости осуществляется к одной крышке 6, в которой выполнены подводящие каналы А и Б. Подача жидкости в левую полость гильзы 3 осуществляется через трубку 5. Весь цилиндр собран с помощью шпилек 8, стягивающих обе крышки 1 и 6.
На рис.2.72 показан гидравлический цилиндр, разработанный Московским специальным конструкторским бюро автоматических линий и агрегатных станков, который можно демонтировать со станка без особых трудностей, не прибегая к разборке узлов станка. Гильза 8 цилиндра крепится в неподвижном узле станка 1 на кронштейнах с помощью болтов 2, полуколец 3 и фланца 4. Шток 9 цилиндра с поршнем 6 и уплотнениями 5 соединяется с кронштейном подвижного узла станка 10 с помощью гаек. Шток 9 выполнен полым. Внутри него проложена трубка 12, соединяющая правую полость цилиндра с клапаном 11 в гайке крепления штока. Аналогичный клапан 7 устанавливается и в гильзе цилиндра цилиндра 8. Поскольку при работе гидроцилиндра с переменным давлением в нем может скапливаться нерастворенный воздух, равно как и после длительного перерыва в работе, то встроенные клапаны 7 и 11предназначаются для выпуска нерастворенных газов при, соответственно, горизонтальном и вертикальном монтаже гидроцилиндра. Это обеспечивает быструю подготовку цилиндра к работе. Вместе с тем, при монтаже цилиндра на неподвижном узле станка тепловые деформации гильзы 8 не передаются подвижному узлу (столу) станка [10].
Этим же СКБ разработан гидроцилиндр (рис.2.73), подвод жидкости в который можно осуществлять через полый шток 2. Это очень удобно, если по условиям работы подвижным является корпус цилиндра, а шток неподвижен. По подсоединенным к каналам А и Б трубопроводам жидкость по каналу 3 внутри трубки попадает в левую полость цилиндра, а по каналу 4 внутри полого штока 2 в правую полость цилиндра. Однако, если нужен обычный режим работы, когда цилиндр неподвижен, а перемещается шток, то трубопроводы можно подсоединить к каналам, закрытым пробками 1 и 5. Такое конструктивное решение исключает необходимость применения гибких трубопроводов (шлангов или рукавов).
Характерным для гидроцилиндров зажима (рис.2.74) является малый ход поршня 4 цилиндра и достаточно большая эффективная площадь полостей цилиндра, обеспечивающих достижение требуемых усилий зажима. Обычно ход поршня цилиндров зажима составляет от 5 до 250 мм.
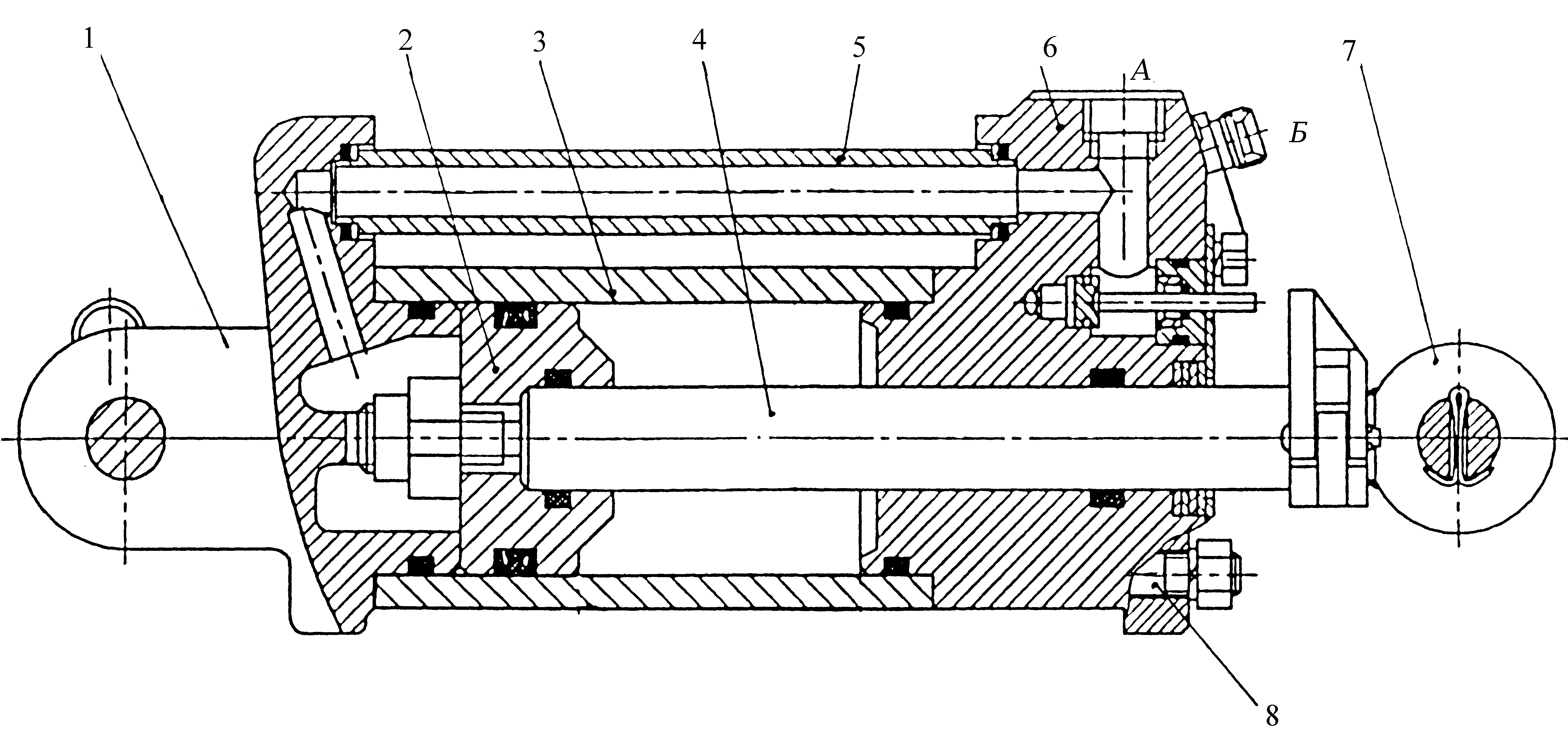
Рис.2.71. Гидроцилиндр с односторонним штоком на проушинах
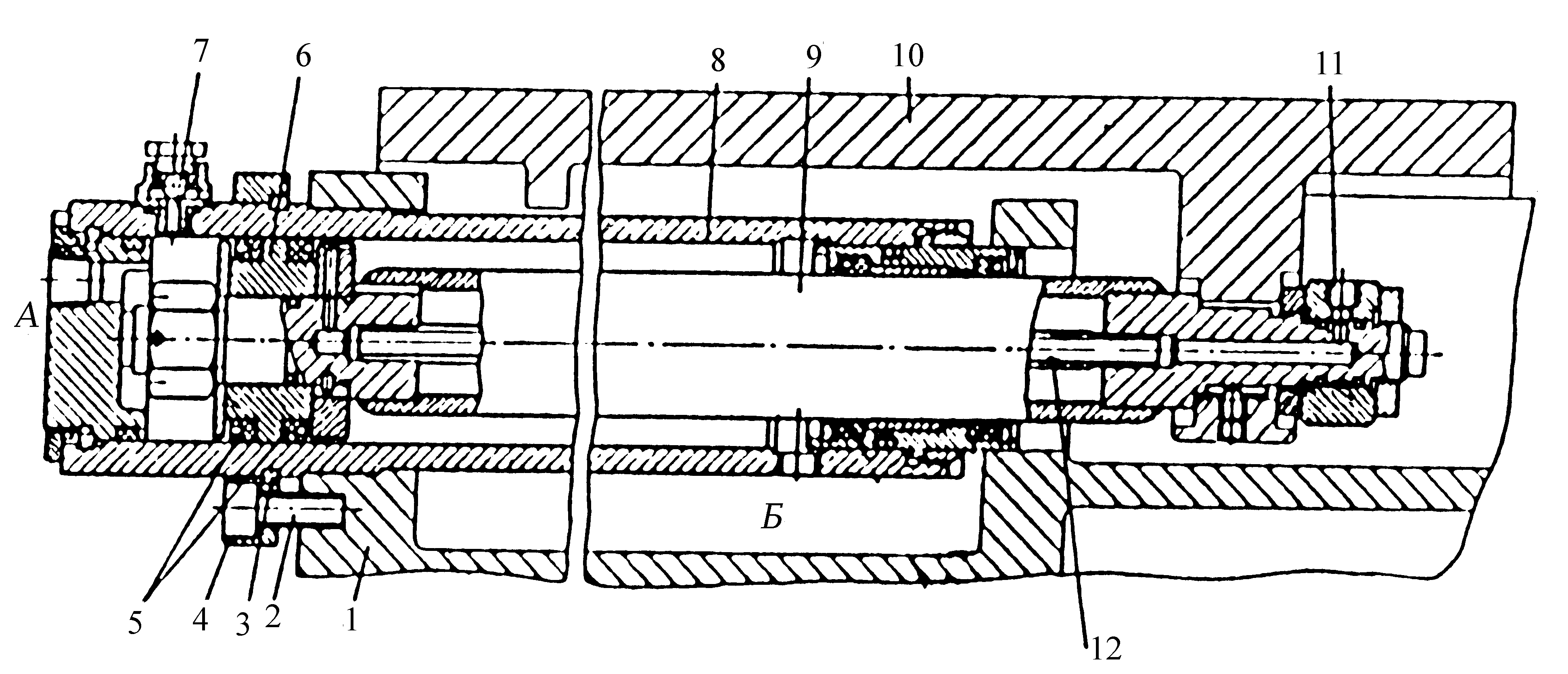
Рис.2.72. Гидроцилиндр подачи станка
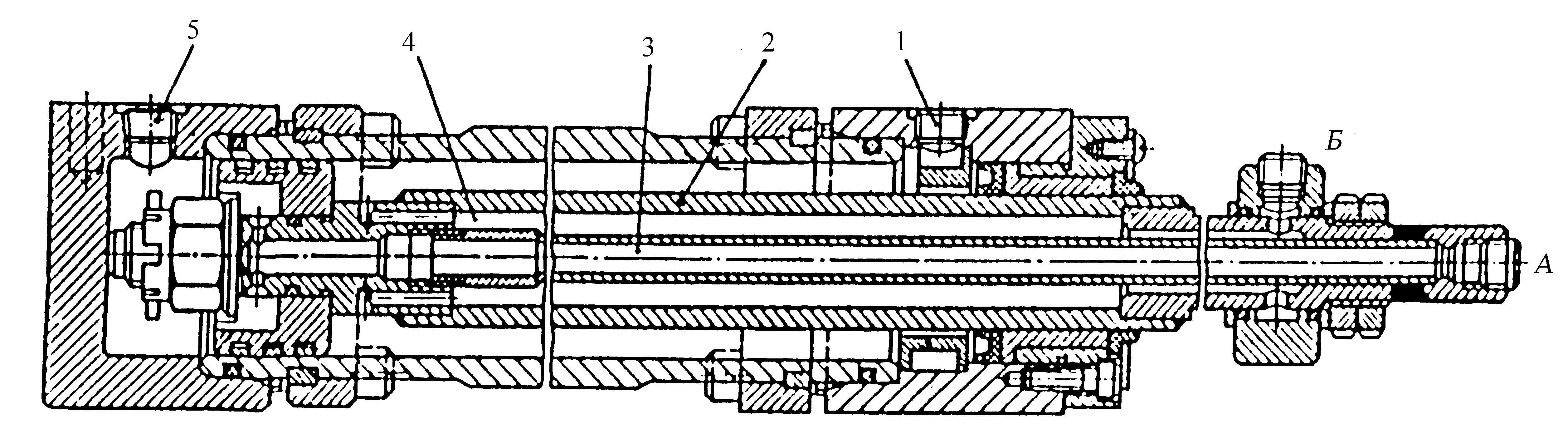
Рис.2.73. Гидроцилиндр подачи стола с подводом рабочей жидкости через шток
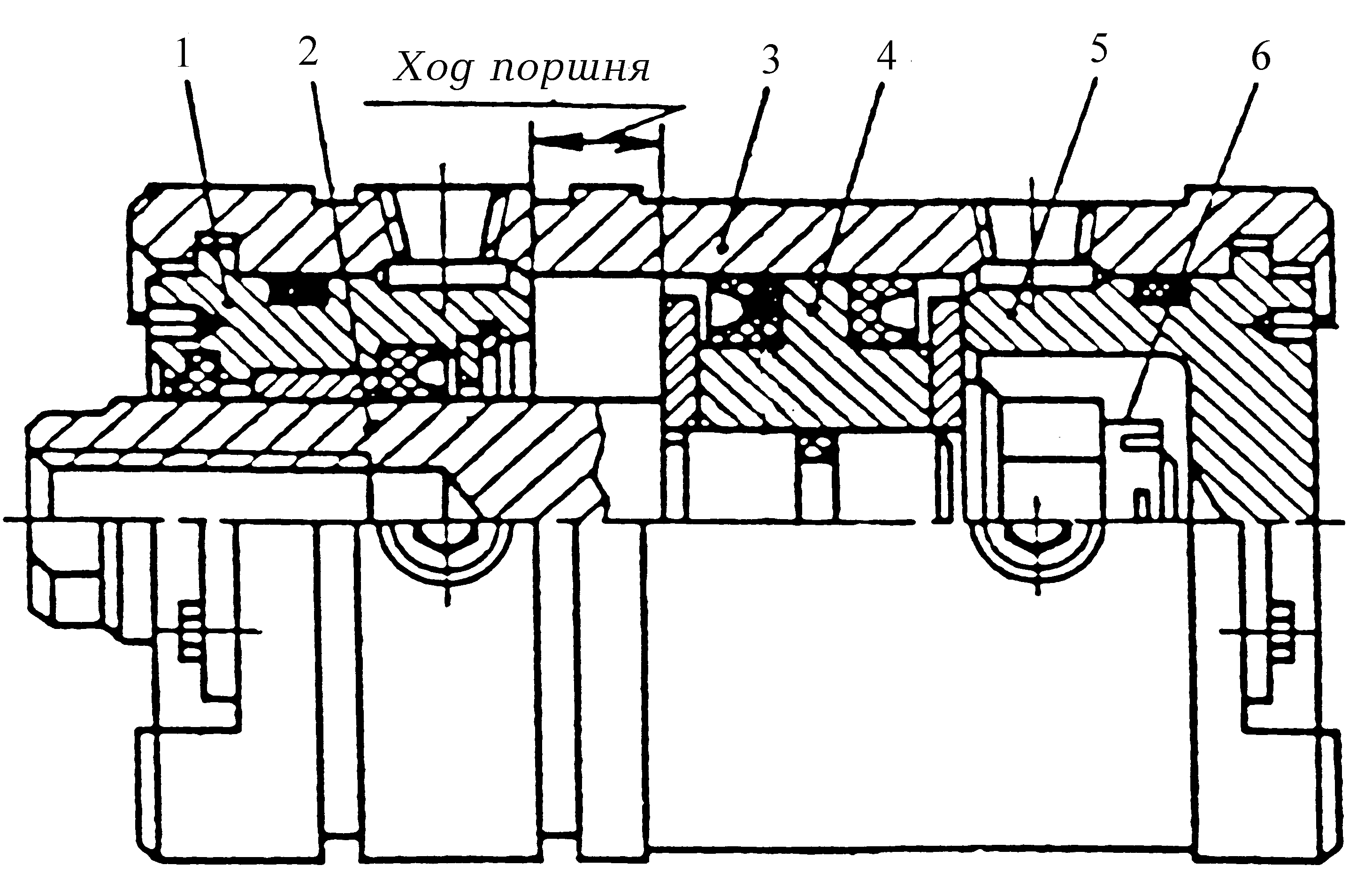
Рис.2.74. Гидроцилиндр зажима: 1, 5–крышки левая и правая; 2 - шток; 3 - гильза; 4 - поршень с уплотнениями; 6 - гайка крепления поршня
Особую группу составляют гидравлические цилиндры одностороннего действия с односторонним штоком, которые обычно называют плунжерными цилиндрами. В таких цилиндрах нет поршня. Его роль выполняет сам шток 1 (рис.2.75а), называемый плунжером (отсюда и название цилиндра), который имеет наружный диаметр d меньше внутреннего диаметра гильзы цилиндра 2. Поэтому обработка гильзы может быть проведена по более простой и дешевой технологии. Да и форма поперечного сечения гильзы может быть любой. Конструктивные схемы плунжерных цилиндров приведены на рис.2.75. Особенность плунжерных гидроцилиндров в том, что они преодолевают внешнюю нагрузку лишь в одном направлении, а для возврата штока (в данном случае - плунжера) в исходное положение необходимы дополнительные механизмы. На рис.2.75а и 2.75б возврат плунжера 1 осуществляют пружины растяжные 3 и сжатия 4, на рис.2.75в показан возврат с помощью собственного веса и веса перемещаемых узлов, соединенных с плунжером 1 при вертикальной установке цилиндра. На рис.2.75г показан сдвоенный плунжерный цилиндр, в котором перемещается гильза 2, а жидкость подается по каналам внутри неподвижных плунжеров 1. Такой плунжерный цилиндр уже может совершать возвратно-поступательные перемещения и преодолевать нагрузку при движении в обе стороны.

Рис.2.75. Конструктивные схемы плунжерных гидроцилиндров
При значительной длине хода плунжерного цилиндра в нем предусматривается установка направляющей втулки 5 (рис.2.75в), способствующей надежной (без заклинивания) работе такого двигателя.
Конструктивно плунжерный гидроцилиндр мало чем отличается от рассмотренных выше, если не считать отсутствия как такового поршня. На рис.2.76 показан плунжерный гидроцилиндр (гидроцилиндр одностороннего действия с односторонним штоком) для вертикального монтажа.
Подвод и отвод жидкости осуществляется по каналу А в крышке цилиндра 1, в гильзе 2 установлена направляющая втулка 4, уплотнительный блок 5 и крышка 6. Имеется также пробка 3 для выпуска накопившегося воздуха. Ограничитель 7 препятствует самовыдвижению плунжера 8 при транспортировке цилиндра. После установки цилиндра в технологическом оборудовании ограничитель хода 7 должен быть вывернут из крышки 6.
Для решения специфических задач часто в гидросистемах применяют специальные гидроцилиндры, конструктивные схемы которых приведены на рис.2.77.

Рис.2.76. Гидроцилиндр одностороннего действия с односторонним штоком
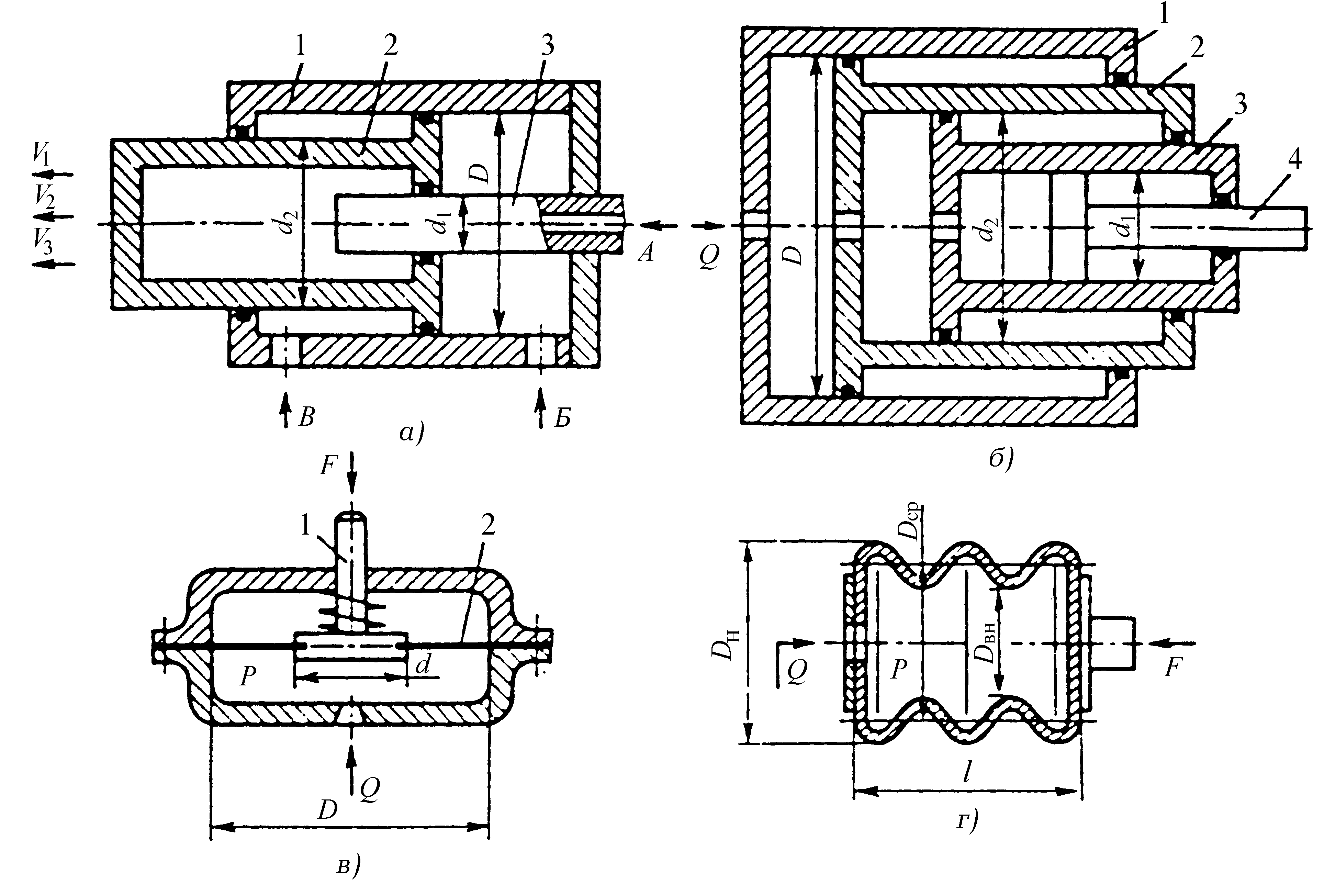
Рис.2.77. Конструктивные схемы специальных цилиндров
Например, когда необходимо получить движение исполнительного органа с несколькими различными скоростями, применяют суммирующие цилиндры (рис.2.77а). Для получения увеличенного хода применяют телескопические цилиндры (рис.2.77б). Мембранные цилиндры (рис.2.77в) дают возможность получить большие усилия при небольшом ходе, а сильфоны (рис.2.77г) обеспечивают высокую чувствительность к изменениям давления и малые перемещения.
Суммирующий гидроцилиндр (рис.2.77а) имеет три входа-выхода А, Б и В. Поэтому, если подать рабочую жидкость с величиной расхода Q по каналу А в штоке 3, а каналы Б и В соединить с баком, то поршень 2 будет перемещаться со скоростью v1 = 4Q/(πd12 ).
Подав жидкость по каналу Б и В в гильзе 1, получим скорость v2=4Q/(π(D2-d22-d12))
При подаче жидкости лишь в канал Б, получим скорость движения v3=4Q/[ π (D2-d2)].
Если же напорную гидролинию насоса соединить с каналами А и Б, то можно получить скорость
v4=4q/(πD2).
Подав жидкость в канал В, можно осуществить реверс поршня 2 со скоростью
v5=4Q/[π(D2-d22)]
Нетрудно заметить, что различные скорости получаются за счет алгебраического сложения эффективных площадей цилиндра. Потому он и называется суммирующим.
Телескопический цилиндр (рис.2.77б) представляет собой ряд цилиндров 1, 2 и 3, вставленных один в другой, с одним штоком 4. Обычно нагрузка прикладывается к штоку. Поэтому при подаче жидкости в гидроцилиндр выдвигаются все цилиндры сразу. Когда цилиндр 2 закончит свой ход, начнет выдвигаться цилиндр 3, а затем уже поршень со штоком 4. Поэтому общий ход цилиндра составит сумму перемещений цилиндров 2, 3 и штока 4.
Достоинство мембранных гидроцилиндров (рис.2.77в) заключается в большой эффективной площади мембраны 2, благодаря чему поршень 2 может преодолевать большие усилия F. Однако ход таких цилиндров мал. Поэтому большое применение мембранные цилиндры нашли в зажимных и тормозных устройствах, когда нужны большие силы, а перемещение незначительно.
Сильфонные цилиндры (рис.2.77г) представляют собой гофрированную трубку (металлическую или резинотканевую), закрытую с обеих сторон. Наружный диаметр Dн сильфонов достигает 200 мм, а рабочее давление - 15 МПа (для малых диаметров). Тянуще-толкающая сила сильфонов F зависит от его среднего диаметра Dср = (Dн+Dвн)/2 и определяется выражением F = PπDср2/4.
Для сильфонов характерен ряд ограничений. Так, не допускается его растягивать более, чем на 10%, и сжимать более, чем на 15% от нормальной длины сильфона. Во избежание скопления в гофрах газов предъявляются более жесткие требования по содержанию нерастворенного воздуха в рабочей среде. Поэтому сильфоны находят более широкое применение в пневматических приводах в качестве чувствительных элементов контрольно-измерительной аппаратуры.
Для предотвращения жестких ударов поршня о крышки цилиндра в конце хода предусматриваются различного рода тормозные устройства, показанные на рис.2.78. Они могут быть встроены в цилиндр (рис.2.78а, б, в), а могут быть расположены в трубопроводе (рис.2.78в). Так, в гидроцилиндре 1 (рис.2.78а) торможение поршня осуществляется за счет дросселирования вытесняемой из полости в крышке 3 жидкости через кольцевой зазор между ступицей поршня 2 и расточкой в крышке. Торможение начинается с момента входа ступицы 2 в расточку крышки. До этого момента жидкость свободно вытесняется через отверстие в цилиндре 1.
В тормозном устройстве, показанном на рис.2.78б, в момент входа ступицы 2 в расточку крышки 3 жидкость из правой полости цилиндра 1 вытесняется через игольчатый дроссель 4, вследствие чего и осуществляется торможение поршня. От степени открытия дросселя 4 зависит интенсивность торможения: чем больше сопротивление поршня и чем меньше проходное сечение, тем больше замедление поршня. Для реверса поршня жидкость подается в полость цилиндра через обратный клапан 5 и центральное отверстие в крышке.
Торможение по схеме рис.2.78в осуществляется за счет дросселя 4, встраиваемого в трубопровод, с момента перекрытия поршнем 2 отверстия А в цилиндре 1. В этом случае вся вытесняемая из правой полости цилиндра жидкость направляется к дросселю 4. Обратный клапан 5 обеспечивает подвод жидкости в правую полость цилиндра, минуя дроссель 4 при реверсе поршня.
И, наконец, в цилиндре 1 (рис.2.78г) осуществляется ступенчатое торможение по мере перекрытия поршнем 2 при своем движении вправо отверстий А, Б, В и Г. Тем самым скачкообразно нарастает сопротивление на пути вытесняемой из правой полости рабочей жидкости, и кинетическая энергия движущегося поршня тратится на преодоление сопротивления, что и приводит к снижению скорости поршня.
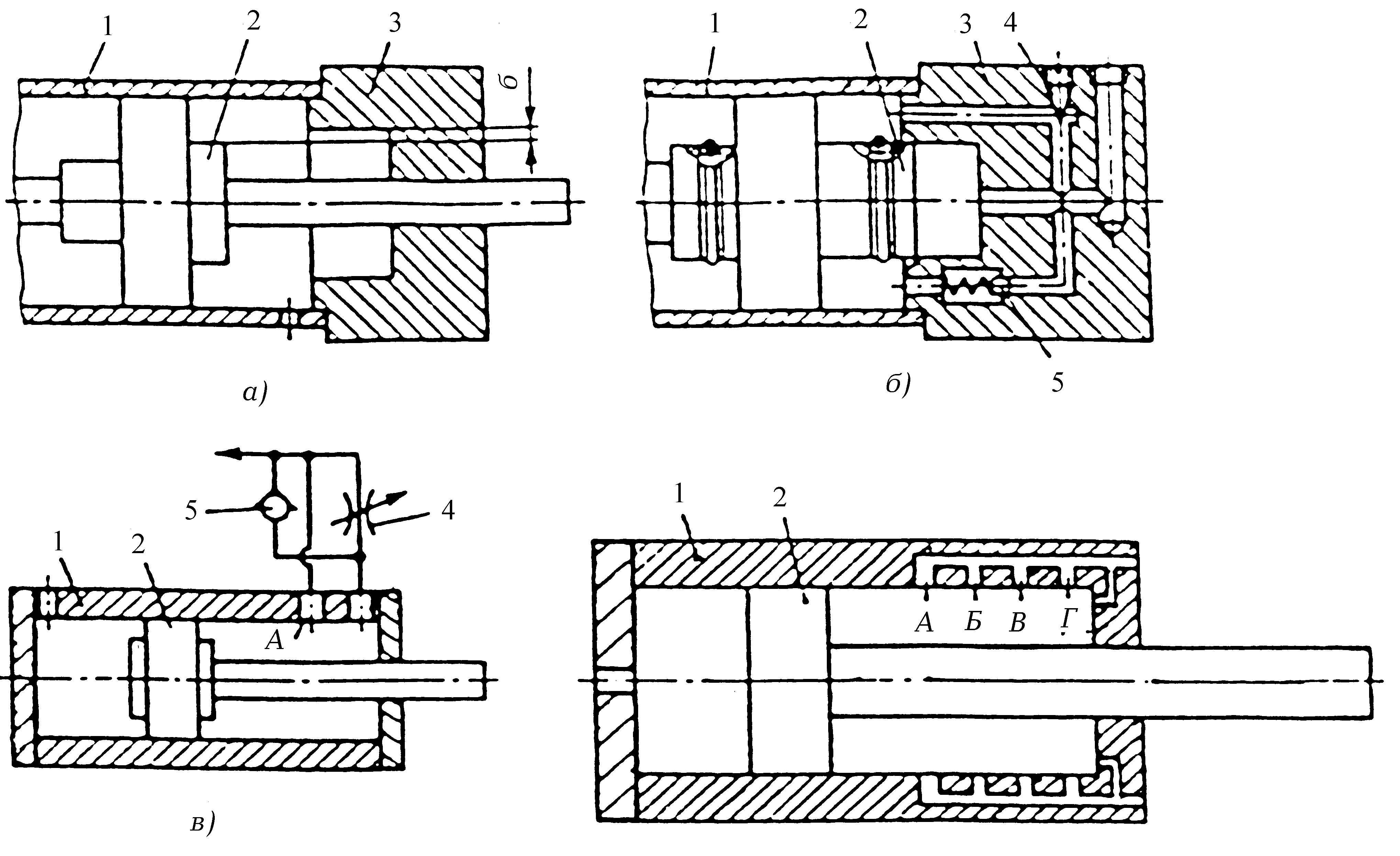
Рис. 2.78. Способы торможения гидроцилиндров
Общим недостатком всех этих тормозных устройств является способность к торможению лишь в конце максимально возможного хода поршня. Если же в работе привода используется лишь часть хода цилиндра и необходимо осуществлять торможение, то необходимо тогда использовать другой способ - торможение путем дросселирования жидкости через тормозные устройства, подключаемые в приводе системой управления в необходимые моменты работы гидравлической системы.
Для осуществления возвратно-вращательных движений (поворотов в обе стороны на ограниченный угол) применяются неполноповоротные гидравлические моторы (рис.2.79) и гидравлические цилиндры, объединенные с различного рода механическими передачами (рис.2.80). Условное обозначение поворотных гидродвигателей приведено в таблице 2.1.
Неполноповоротные гидромоторы (рис.2.79а) конструктивно состоят из статора 1 диаметром D, ротора 2 диаметром d, в котором располагается пластина 3 (их может быть две (рис.2.79б) или три). Подвод и отвод рабочей жидкости Q осуществляется по каналам А и Б в разделителе 4. Воздействуя на пластину, рабочая жидкость создает вращающий момент М, величина которого зависит от радиуса приложения окружной силы r=(D+d)/4 и самой окружной силы F = PS = Pl(D— d)/2, где S - площадь пластины, на которую воздействует жидкость, а l- рабочая длина пластины вдоль оси вращения.
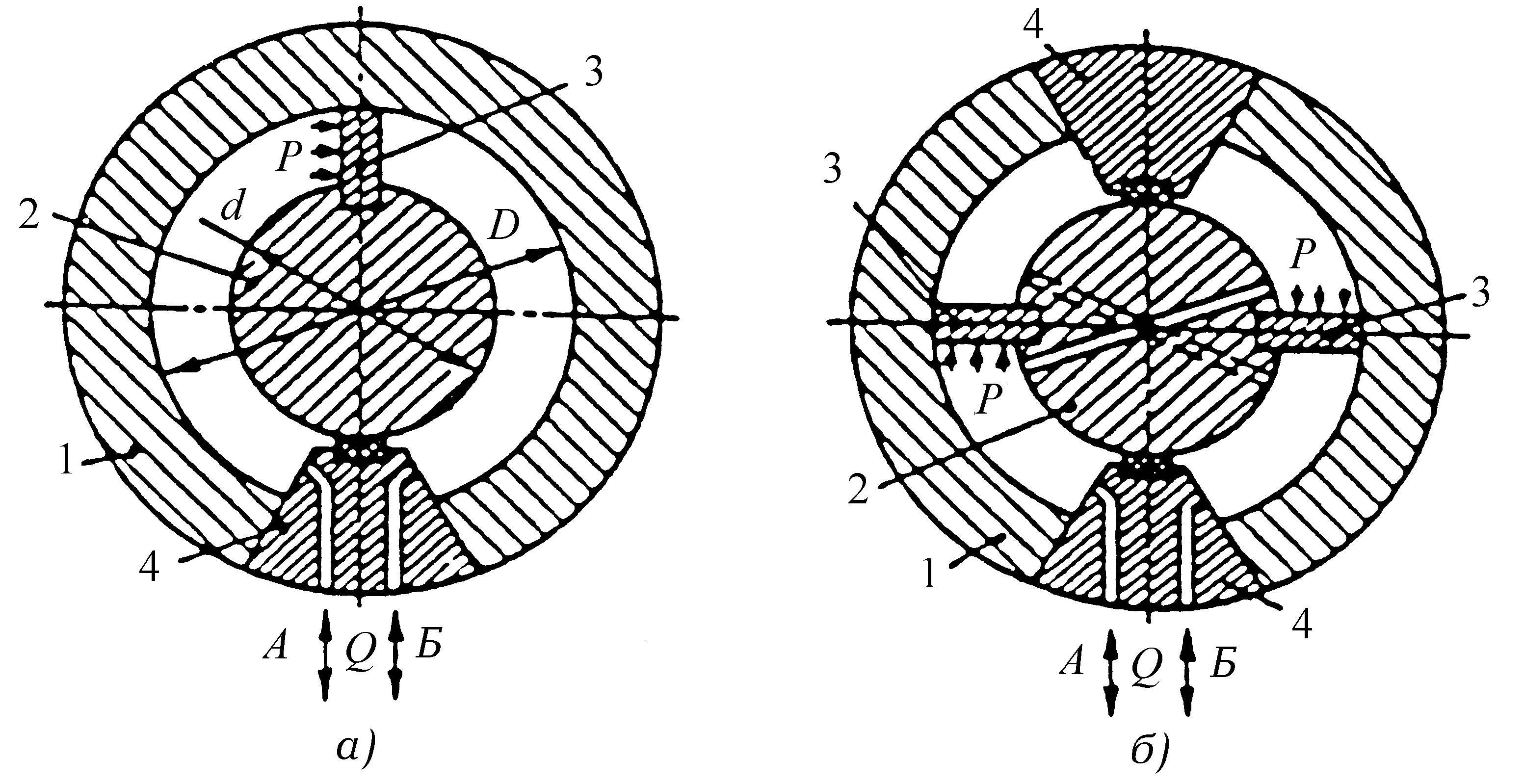
Рис.2.79. Схемы поворотных гидродвигателей: а – однопластинчатого; б – двухпластинчатого
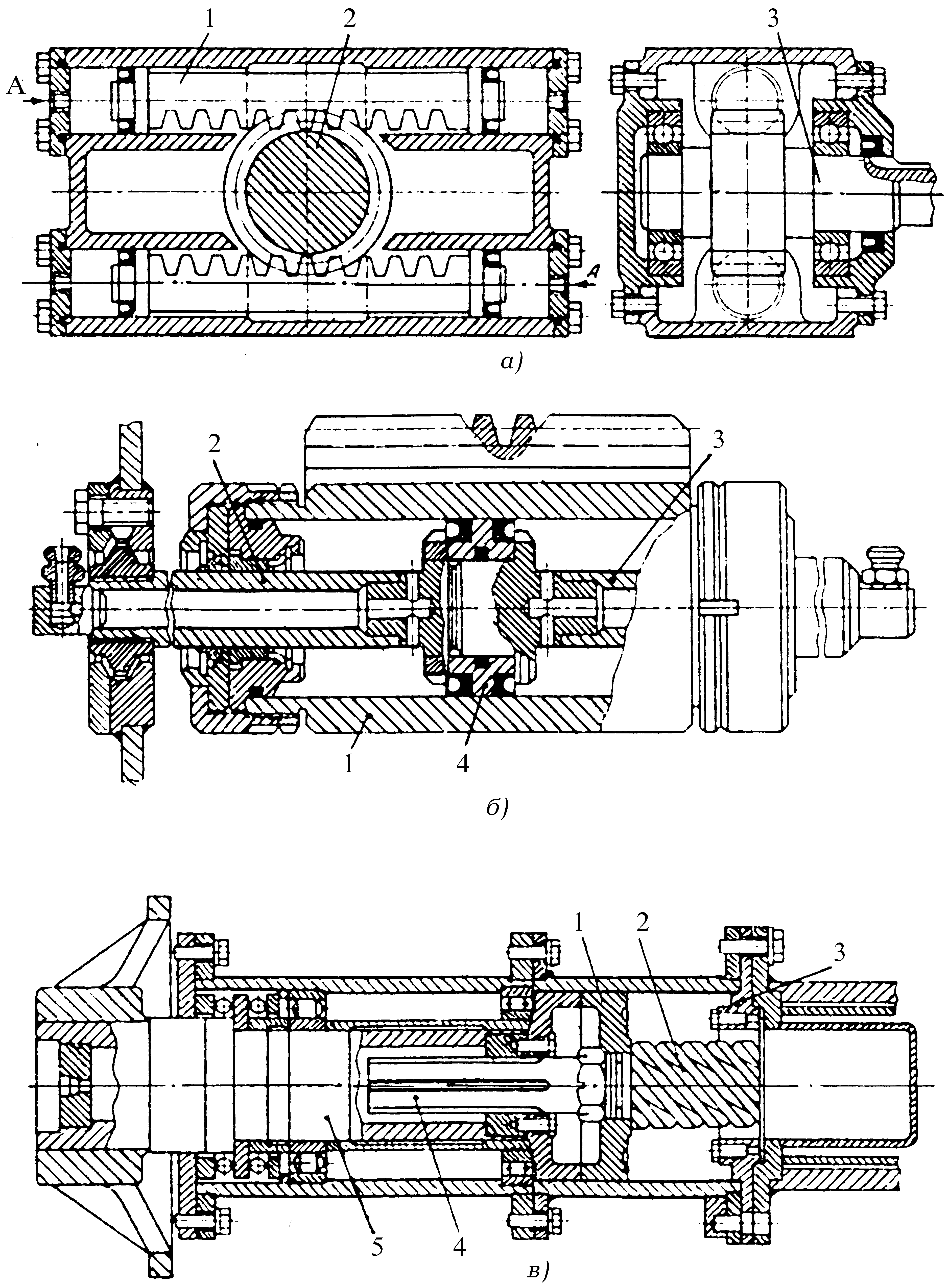
Рис.2.80. Гидроцилиндры для качательных движений
Тогда M = Pzl(D — d )/8, где P - разность давлений в напорной и сливной полостях гидромотора, а z - число пластин. Нетрудно заметить, что величины момента могут быть получены очень значительными. Частота вращения ротора определяется по формуле:
ω=8Q/[(D2-d2)lz].
Фактические значения вращающего момента и частоты вращения будут несколько меньшими из-за потерь давления на преодоления сил трения и утечек рабочей среды. А они могут быть значительными из-за сложностей уплотнения радиального зазора между пластиной статором и торцевого зазора между пластиной и торцевой крышки мотора.
Угол поворота φ неполноповоротного гидромотора зависит от числа пластин. Так, для однопластинчатого гидромотора он составляет не более 270°, для двухпластинчатого - до 150°, для трехпластинчатого - до 70°.
Если же необходимо обеспечить угол поворота более 2π, можно применить такой неполноповоротный гидромотор с дополнительной передачей, например, в виде зубчатого редуктора. Но этот путь не всегда осуществим, поскольку ведет к увеличению габаритов и массы двигателя и снижает энергоемкость привода.
Часто для получения качательных движений на угол, превышающий 2π, используются гидроцилиндры со встроенными механическими преобразователями поступательного движения поршня во вращательное (качательное) движение исполнительного звена.
Так, на рис.2.80а показан гидроцилиндр с реечно-зубчатой передачей. Поршни цилиндра связаны с зубчатой рейкой 1, которая находится в зацеплении с шестерней 2, вращающей вал 3. Таким образом, возвратно-поступательное движение поршня преобразуется во возвратно-вращательное движение вала 3. При этом его угол поворота зависит от длины хода поршня (рейки 1) и диаметра шестерни. Вращающий момент такого гидродвигателя также будет зависеть от диаметра шестерни 2, а также и от диаметра d поршня, на который воздействует рабочая жидкость при давлении Р, т.е. можно записать, что M = Pnd2mz/8, где m - модуль реечной передачи, а z - число зубьев шестерни. Зная длину хода поршня l и параметры реечной передачи, легко определяется угол поворота в радианах φ = 2πl/(mz). Частота вращения тоже определяется легко:
ω=8Q/(πd2mz).
Отличие гидромотора на рис.2.80б от предыдущих заключается в том, что рейка выполнена на самом цилиндре 1, а поршень 4 с полыми штоками 2 и 3 неподвижен.
В гидроцилиндре на рис.2.80в применена несамотормозящая винтовая передача. Поршень 1 и винт 2 связаны между собой. Поэтому при перемещении поршня с винтом относительно жестко закрепленной гайки 3 вращается винт и жестко связанный с ним шлицевой вал 4, передающий вращение выходному валу 5. В таком двигателе вращающий момент будет зависеть от рабочей площади поршня, диаметра и угла подъема резьбы винта, а угол поворота от длины хода поршня 1 и шага винта 2.

