







В пневмоэлектрических системах исполнительное движение чаще отводится пневматическому приводу, а обработка управляющих команд выполняется электрическими и электронными средствами. Схема привода дозатора формовочной смеси приведена на рис.5.40. Ниже основного бункера 1 с челюстным затвором подвешенна упругих элементах 2 бункер 3 меньшей вместимости. При открывании челюстного затвора основного бункера материал перемещается в малый бункер (дозатор). Под действием сил тяжести пересыпаемого материала упругие элементы деформируются. Деформация регистрируется датчиком 4 и преобразуется в электрический сигнал.
В качестве такого датчика используются тензометрические, потенциометрические, индуктивные, емкостные и другие преобразователи деформации в электрический сигнал. Сигнал, поступающий от датчика 4, усиливается устройством 5 и поступает в сравнивающее устройство 6. Там сигнал сравнивается с сигналом задающего устройства 7. Как только масса пересыпаемого материала достигает заданного значения, сравнивающее устройство выдает команду пневмоэлектрическому клапану на выключение его электромагнита. Якорь электромагнита под действием пружины опускается. Клапан 8 занимает нижнее положение, отсоединяя камеру 9 от атмосферы и подключая ее к напорной линии.
Мембрана 10 прогибается, клапан 11 занимает верхнее положение, соединяя с атмосферой камеру 12 и полость 13 цилиндра. Так как давление в камере 14 падает, клапан 15 отжимается под действием давления в напорной линии, и напорная линия подключается к полости 16 цилиндра. Поршень под действием сил, образованных в результате создавшегося перепада давлений в полостях цилиндра, передвигается и закрывает челюстной затвор. Последний соединен с поршнем посредством рычага и штока. В нужный момент подается команда пневматическому приводу челюстного затвора дозатора для открытия затвора и выдачи отмеренного материала.
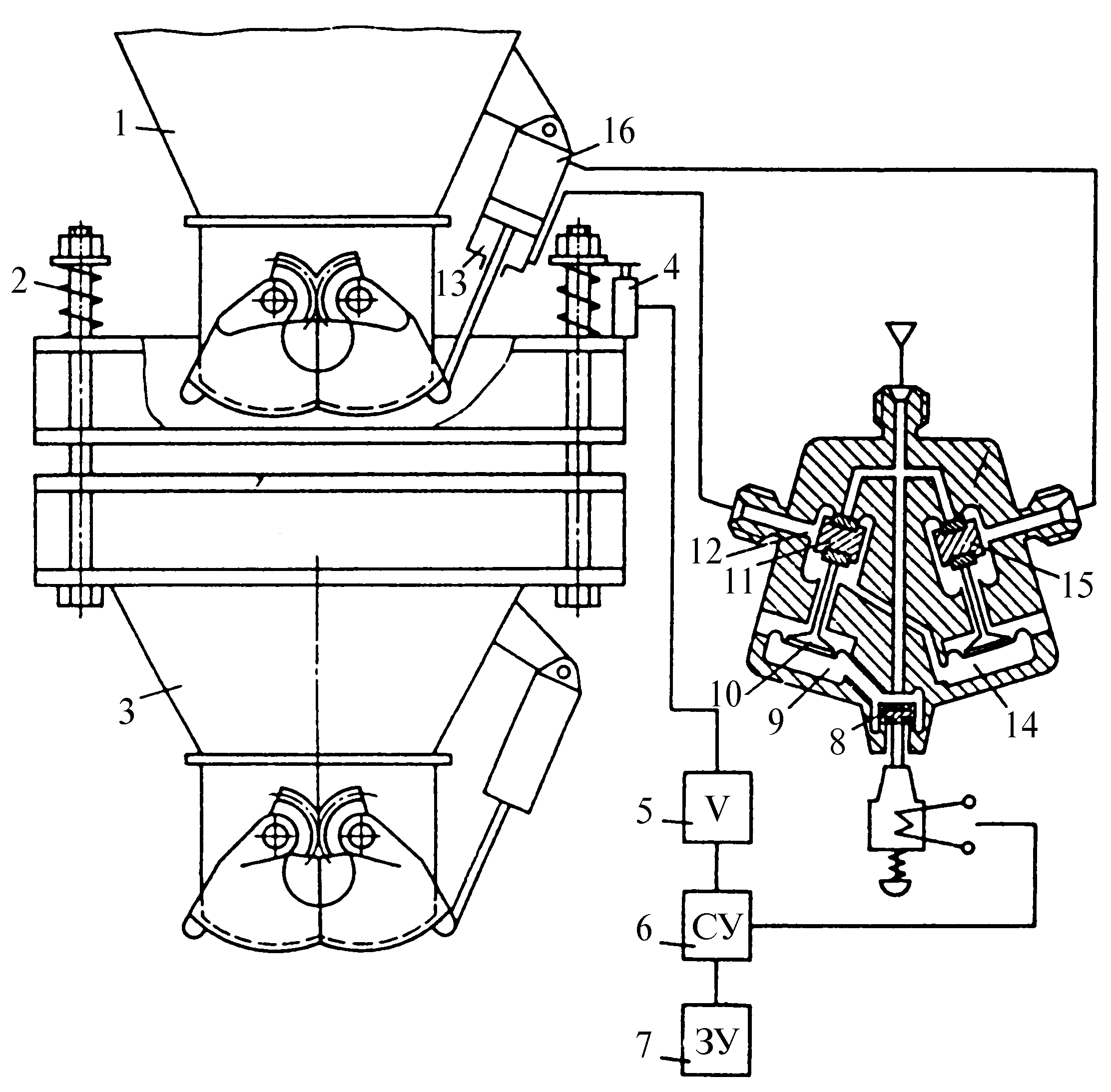
Рис.5.40. Дозатор формовочной смеси
Пневмоэлектрические системы управления приводами, осуществляющие стабилизацию одного параметра, широко используютвомно-гих отраслях промышленности. Такая система регулирования толщины ленты дана на рис.5.41. Через пневматическую скобу 1 протягивается лента 2. При увеличении толщины ленты зазоры между соплами скобы и лентой уменьшаются. Давление в емкости 3, куда поступает воздух через дроссель4, увеличивается. Уровень водыв емкости 3 понижается, и контакт между электродом 5 и водой разрывается. В случае если толщина ленты будет меньше допустимой, то зазоры между соплами и лентой увеличатся. При этом давление в емкости 3 уменьшится, уровень воды поднимется и замкнет электрод 6. Полученные сигналы могут быть использованы для управления приводом, формирующим толщину ленты, или для сигнализации нарушения хода технологического процесса изготовления ленты.
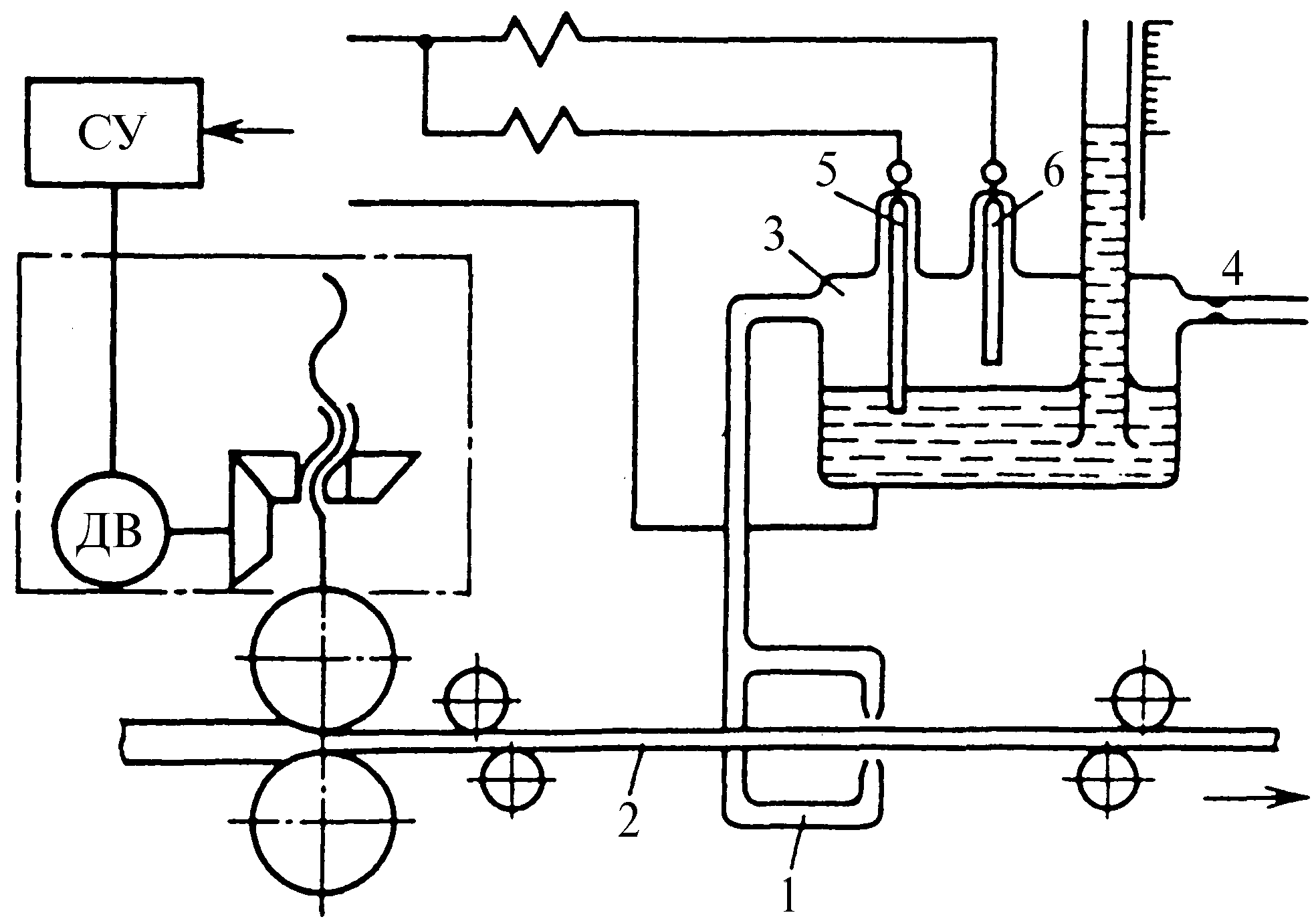
Рис.5.41. Пневмоэлектрическая система регулирования толщины ленты
Структурная схема пневматического привода ориентации летательных аппаратов, управляемого электронными средствами, дана на рис.5.42. Источником энергии является сжатый газ до давления 35 МПа в баллоне 1. При подаче команды от программного устройства ПУ приводу клапан 2 высокого давления перекладывается в позицию а, и газ устремляется к регулятору давления 3. Регулятор давления снижает давление газа до постоянного рабочего давления 0,1 МПа, далее газ поступает к реактивным микродвигателям, состоящим из управляющих клапанов4 и сопел 5. Реактивные микродвигатели включаются по команде вычислительной бортовой машины ВБМ. Команда формируется в результате обработки информации, поступающей от датчиков ориентации ДО и программного устройства ПУ. При открытии клапана 4 газ поступает в сопло 5 и при выходе из него создает тяговую силу, необходимую для ориентации летательного аппарата.
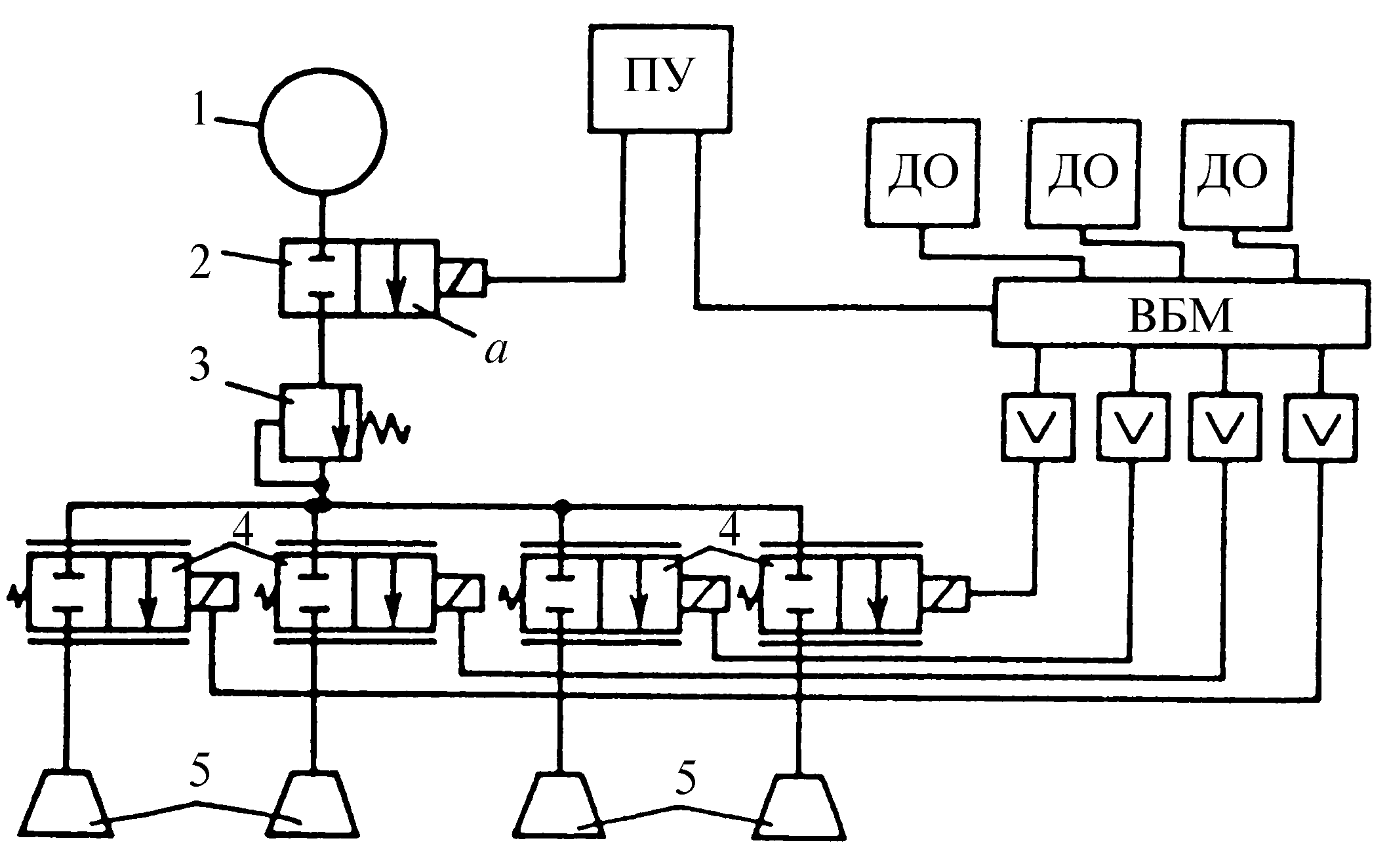
Рис.5.42. Структурная схема привода ориентации летательных аппаратов
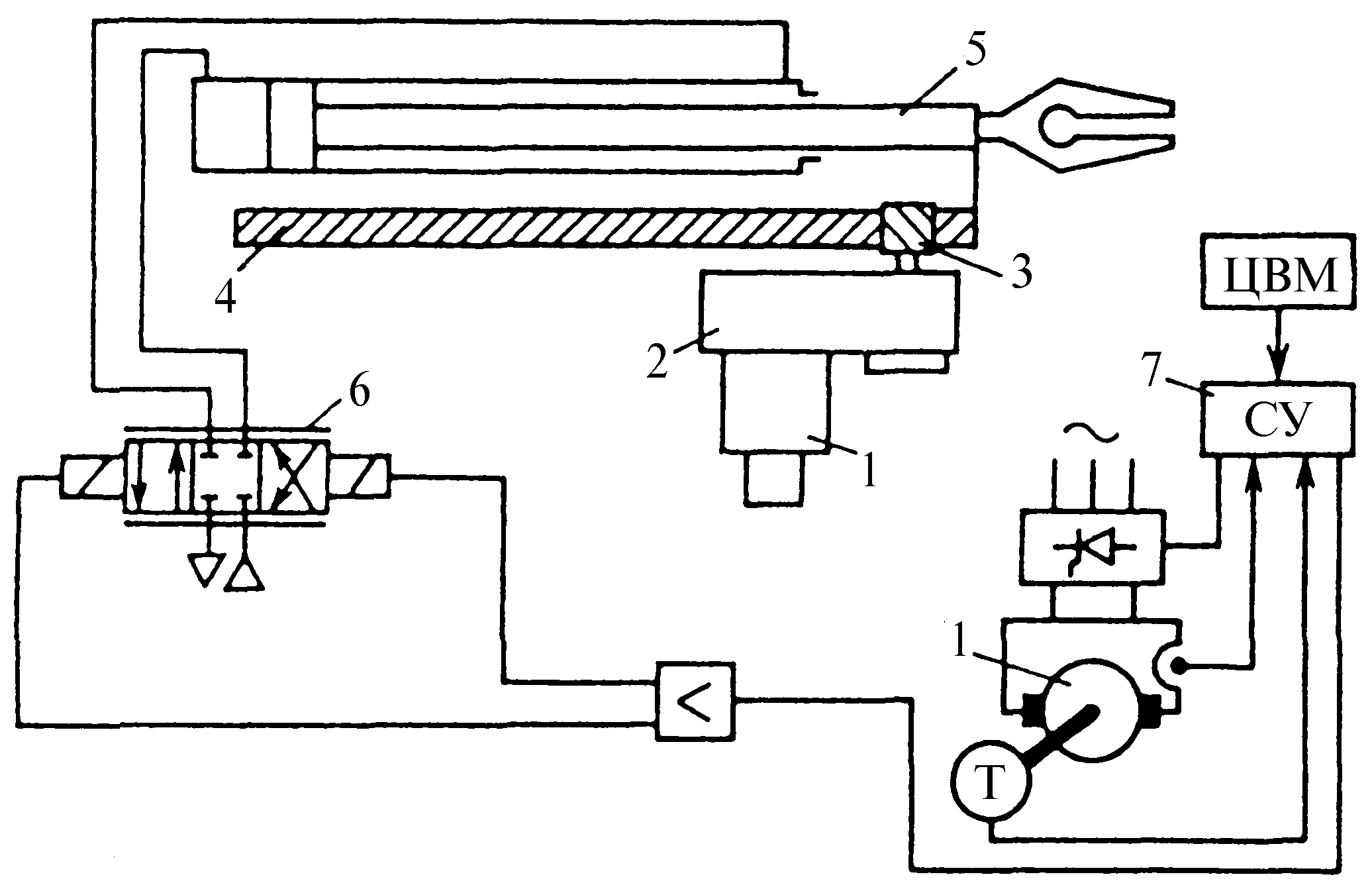
Рис.5.43. Двухканальный пневмоэлектрический привод промышленного робота
Большими возможностями обладают двухканальные приводы, т.е. приводы, у которых энергия к исполнительному механизму поступает по двум каналам. Такие приводы имеют два параллельно работающих двигателя. Двигатели могут быть одного типа или разные. Один двигатель задает движение, а другой (основной) воспринимает основную нагрузку. На рис.5.43 приведена схема двухканального пневмоэлектрического привода промышленного робота. Электрический двигатель 1 через редуктор 2 приводит во вращение зубчатое колесо 3, приводящее в движение зубчатую рейку 4, жестко связанную со штоком пневматического цилиндра 5, который управляется пневмораспределителем 6 с электронным управлением 7. Последнее следит за изменением значения и направления тока в обмотках электродвигателя. При увеличении величины тока в обмотках электродвигателя возрастает пропускная способность распределителя 6. Поэтому увеличивается перепад давления в рабочих полостях цилиндра. Шток цилиндра воспринимает нагрузку и с большей скоростью передвигает зубчатую рейку, разгружая тем самым электродвигатель. Если шток гидроцилиндра начнет быстрее двигаться, чем задано, то электродвигатель будет работать в тормозном режиме, направление тока в его обмотках изменится, электронная системы выдаст команду на уменьшение проходных сечений распределителя, и поршень замедлит свое движение. Двухканальный электропневматический привод по удельной мощности в 1,5 раза превосходит аналогичный показатель электропривода. Это весьма важнос точки зрения уменьшения массы подвижных частей промышленного робота.
