







Гидромеханические приводы представляют собой сочетание гидропривода с механическими звеньями. На рис.5.38 показан гидромеханический привод для управления в функции пути, где в качестве механического звена использован периодически вращающийся в опорах вал с кулачками и храповым колесом. Поворот последнего на заданный угол происходит при получении сигнала путевого датчика. Величина угла поворота равна 360/k, где k - число требуемых путевых команд. На управляющем валу 3 расположены кулачки 4, 5 и храповое колесо 6. Кулачки действуют на плунжеры золотников 1 и 2, заставляя их занимать определенное, заранее установленное положение при каждом из положений управляющего вала. Периодические повороты последнего совершаются с помощью храпового механизма, когда упор 9 нажмет на пилот 8 и направит поток жидкости в исполнительный двигатель 7.
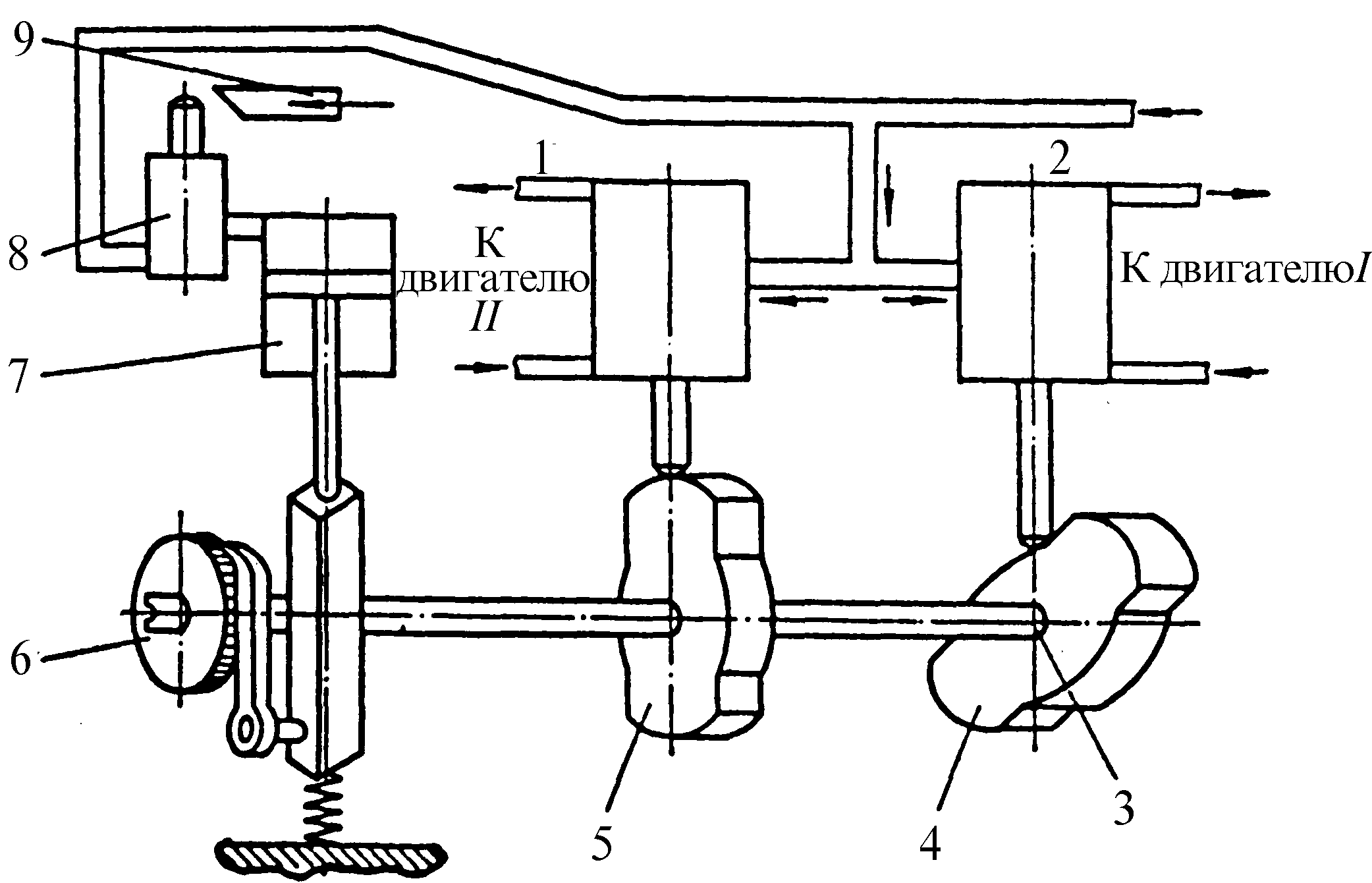
Рис.5.38. Гидромеханический привод с кулачковым валом
На рис.5.39 показан гидромеханический привод с механическим звеном-валиком со шпоночными пазами. Этот привод использован на четырехшпиндельном токарном полуавтомате. Каждый суппорт этого станка имеет гидравлическую систему, показанную на рисунке. Шестеренный насос 12 подает масло в нагнетательный трубопровод 10, разветвляющийся на два направления. В одном из них оно проходит по трубопроводам 10, 8, 23 и течет в левую полость С гидроцилиндра. В другом направлении масло питает плунжерный насос 11 и от него подается по трубопроводам 18, 19, 21, 4 в правую полость D гидроцилиндра.
Действие плунжерного насоса протекает так: параллельно плунжеру 11 насоса расположен валик 14, приводящийся во вращение осью шестеренного насоса. На поверхности этого валика выполнен ряд продольных шпоночных пазов, расположенных в шахматном порядке. В положении, показанном на рисунке, один изтаких пазов (15) соединяет трубопровод 17 с полостью А насоса, и поступающая туда жидкость отталкивает плунжер 11 вправо, заставляя его вытолкнуть масло из полости В, через шпоночный паз 13 в трубопровод 18. Когда при повороте валика 14 на некоторый угол придет в рабочее положение следующий ряд его шпоночных пазов, масло из нагнетательного трубопровода 9 поступит в правую полость и отожмет плунжер 11, вытесняя масло из полости А в трубопровод 18. Производительность плунжерного насоса можно регулировать, изменяя ход плунжера перестановкой упора.
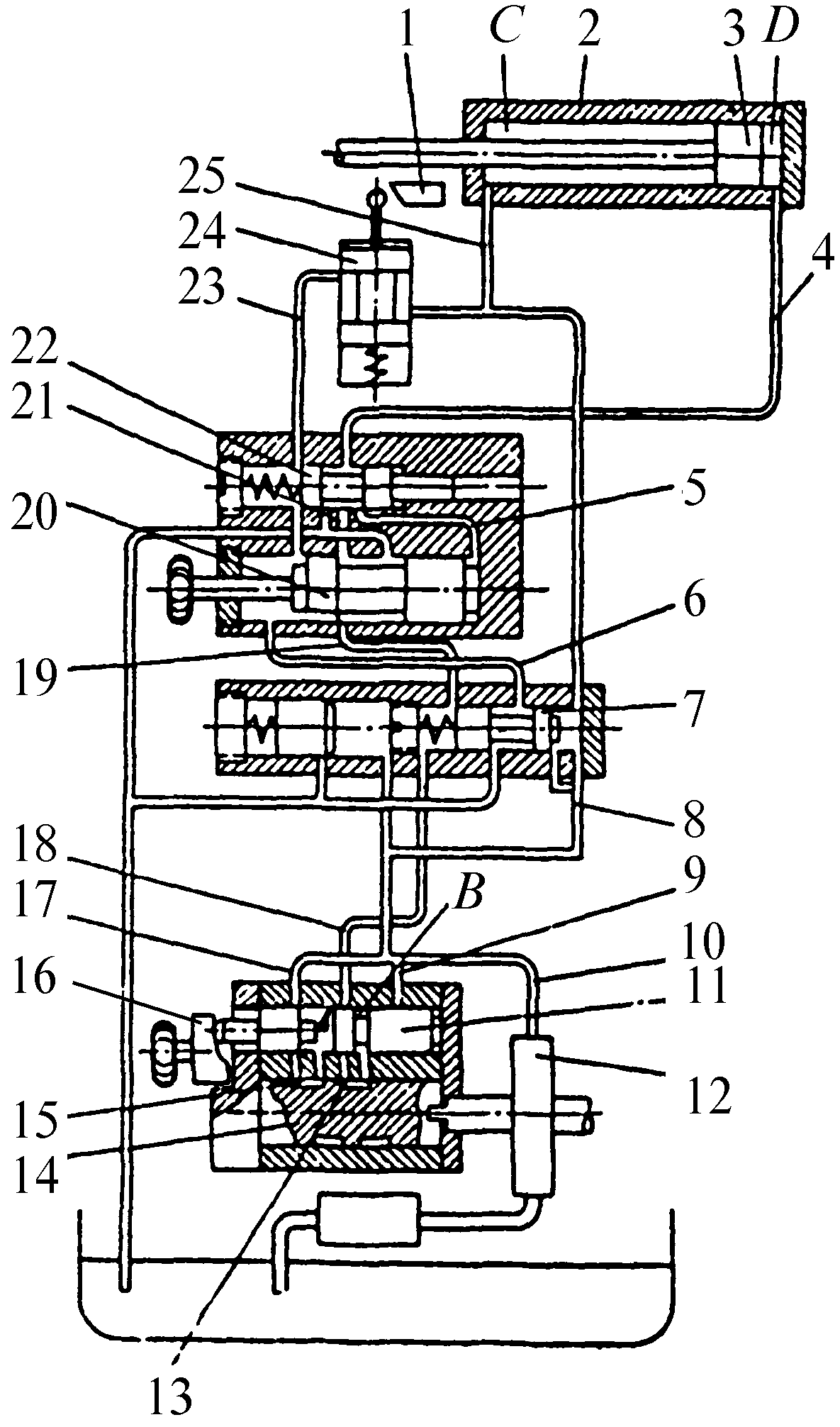
Рис.5.39. Гидромеханический привод со шпоночным валиком
Командный сигнал о начале перемещения суппорта поступает в систему в момент, когда шпиндельный барабан полуавтомата закончил поворот и зафиксирован. Сигнал заключается в повышении давления масла в канале 5. Следствием этого является отвод клапана 22 влево; масло из канала 5 может теперь пройти в правую полость золотника 20. Плунжер последнего отводится в левое положение и этим создает ускоренный ход поршня влево, направляя в правую полость оба потока: один - из трубопровода 25 через пилот 24, трубопровод 23, золотник 20 и трубопровод 4, второй - из трубопровода 19 через золотник 20 и трубопровод 4. В момент окончания быстрого подвода суппорта связанный с ним упор 1 нажимает на плунжер пилота 24, опускает его и прекращает проход масла через пилот; теперь в правую полость цилиндра двигателя поступает только один поток жидкости от плунжерного насоса, и поршень 3, а следовательно, и суппорт совершают рабочий ход. Регулируя производительность плунжерного насоса, можно менять значение подачи рабочего хода.
Когда суппорт достигает конечного положения и встречает жесткий упор, давление в трубопроводах 18, 19, 4 возрастет, приближаясь к давлению в трубопроводах 8, 25. Это давление в сочетании с действием пружины заставляет плунжер золотника 7 передвинуться вправо и открыть доступ масла из трубопровода 8 в левую полость золотника 20; плунжер последнего передвигается вправо исвязывает трубопроводы 19 и 4 со сливом. Под действием потока масла, подаваемого из трубопровода 25, суппорт быстро перемещается в исходное положение. Трубопровод 23 может быть связан с баком через трубопровод 6.
