







В конструкциях технологического оборудования для автоматизации технологического цикла в функции «быстрый подвод рабочего органа (РО), первая рабочая подача, вторая рабочая подача, быстрый отвод и останов» используется электрогидравлический привод. Движение каждого РО контролируется попути, и вконце своего перемещения этот орган воздействует на электрический путевой датчик, вызывая появление командного сигнала для выполнения следующего технологического действия. Автоматизация технологического цикла таким способом удобна при использовании типовых гидравлических панелей, выбор которых определяется условиями данной работы.
В положении, показанном на рис.5.36, происходит быстрый подвод РО. Жидкость, подаваемая насосами высокого 14 и низкого 15 давлений по трубопроводам 13, 18 и 17, проходит через золотник 5а, трубопровод 4, золотник 3а и трубопровод 2 в полость А двигателя. Для этого включаются электромагниты 20 и 23 – плунжеры вспомогательных золотников 19 и 24 подвинуты вправо, и жидкость, поступая по трубопроводам 21 и 25 в левые полости золотников 3а и 5а, удерживает плунжеры 3 и 5 в правом положении. Жидкость, вытесняемаяиз полости В, проходит через трубопровод 26 и золотник 3а на слив.

Рис.5.36. Использование электрогидравлического привода для автоматизации технологического цикла
В момент окончания быстрого подвода каретка, перемещаемая двигателем 1, воздействует на электрический датчик, выключающий электромагнит 20. Плунжер золотника 19 пружиной отводится влево и связывает левую полость золотника 5а со сливом. Это позволяет пружине отвести плунжер 5 тоже влево – теперь начинается рабочий ход. Давление жидкости в системе возрастает, обратный клапан 16 отделяет цепь высокого давления от цепи низкого, и жидкость от насоса 14 проходит через фильтр 12, дроссели 11 и 10, трубопровод 6, золотник 5а, трубопровод 4, золотник 3а и трубопровод 2 в полость А. Скорость рабочего хода определяется пропускной способностью дросселя 10. Излишек жидкости от насосов спускается на слив через предохранительный клапан.
Для изменения подачи нужно воздействовать на путевой датчик и включить электромагнит 7. При этом плунжер вспомогательного золотника 8 опускается, и жидкость от дросселя 11 проходит по трубопроводу 9 в трубопровод 6 и дальше тем же путем, что и раньше. В результате этого величина подачи каретки определяется пропускным сечением дросселя 11.
В конце рабочего хода каретка действует на электрические путевые датчики, включающие электромагнит 20 и выключающие электромагнит 24. Плунжер 5 передвигается вправо, а плунжер 3 – влево, и оба потока жидкости от насосов 14 и 15 направляются от трубопровода 13 через золотник 5а, трубопровод 22, золотник 3 и трубопровод 26 в полость В. Полость А связывается трубопроводом 2 и золотником 3а со сливом, а РО возвращается вправо.
Если выключить все электромагниты, то плунжеры 3 и 5 окажутся в левом, а плунжер золотника 8 – в верхнем положении. Доступ в полости А и В закрыт, и насосы работают на слив через предохранительные клапаны.
Электрогидравлический привод со смешанным управлением в функции пути и давления часто применяется в технологическом оборудовании для выполнения ряда вспомогательных действий, связанных с зажимом и освобождением изделия. Привод часто оформляют в виде типовой гидропанели. Последняя в сочетании с двухнасосной станцией (рис.5.37) позволяет выполнить быстрый подвод зажимного элемента в соприкосновение с изделием, зажим, быстрый отвод зажимного элемента, останов и возврат в исходное положение.
В положении, показанном на рисунке, соответствующем включению электромагнита 2 посредством путевого датчика, осуществляется быстрый подвод. Жидкость от насосов 5 и 6 поступает в цилиндр 3 исполнительного двигателя по пути, указанному стрелками. Как только зажимной элемент входит в соприкосновение с изделием, давление в системе повышается, обратный клапан 7 закрывается и отделяет цепь высокого от цепи низкого давления. Жидкость, подаваемая насосом 6, направляется на слив, а жидкость от насоса 5 поступает в исполнительный двигатель и заставляет его осуществить зажим изделия. Это состояние сохраняется в течение всего периода обработки изделия на данной операции. В конце последней сигнал от путевого датчика выключает электромагнит 2 и включает электромагнит 1. Плунжер 4 управляющего золотника движется вверх и соединяет левую полость цилиндра двигателя с нагнетательным трубопроводом, а правую - со сливом. Снова объединяются потоки жидкости от обоих насосов, и происходит быстрый отвод зажимного элемента в исходное положение. После этого давление в системе повышается. Зажимной элемент удерживается в достигнутом положении давлением жидкости от насоса 5, а насос 6 работает на слив, так как обратный клапан 7 снова закрыт.
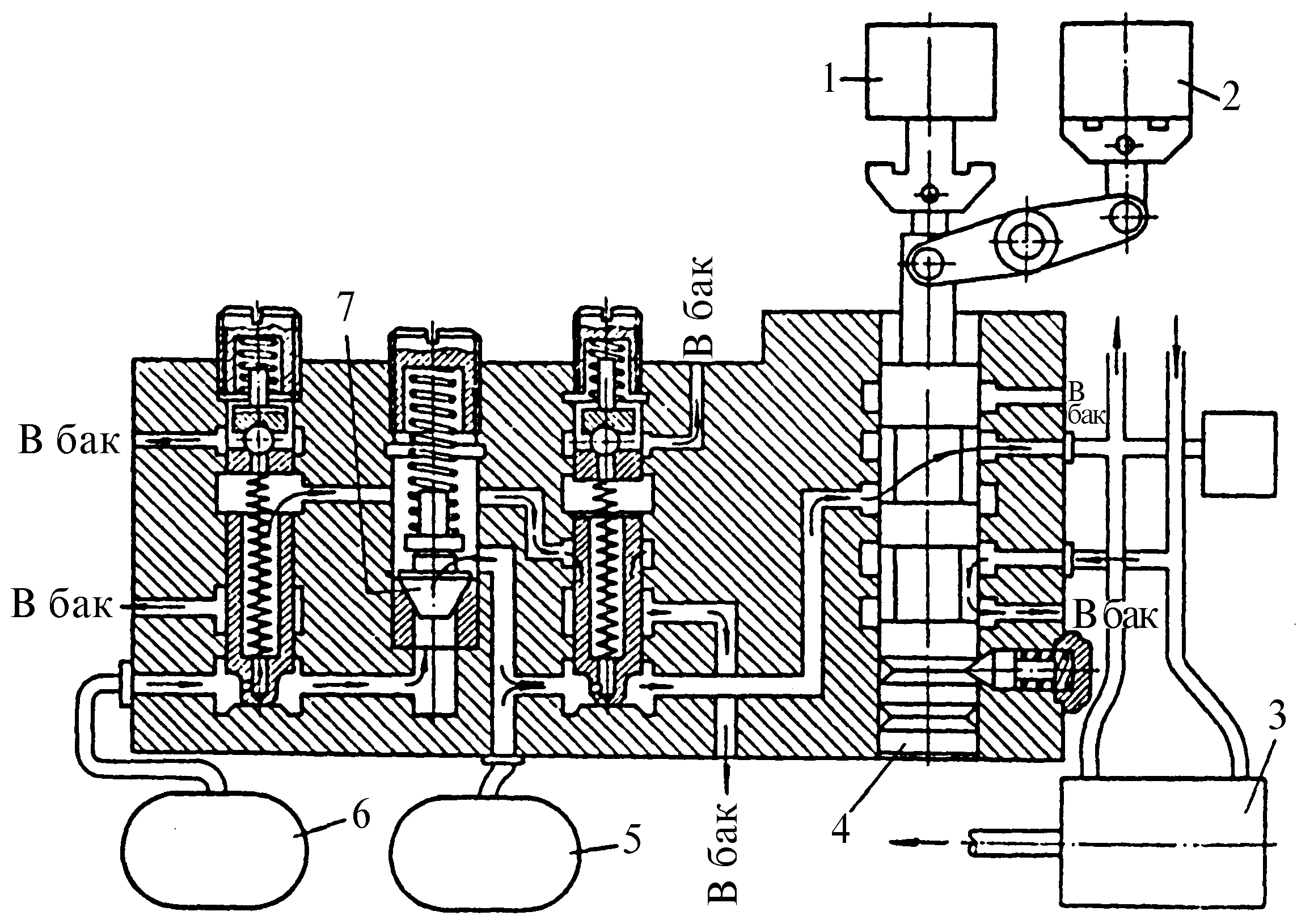
Рис.5.37. Использование электрогидравличеекого привода для зажима, разжима изделия
