







В качестве систем приводов различного технологического оборудования (металлорежущие станки, промышленные роботы и манипуляторы, автоматические линии, авиационная, автомобильная, сельскохозяйственная и другая техника) широко используются гидравлические и пневматические приводы объемного действия. Под объемным действием понимается принцип работы применяемых гидравлических и пневматических устройств, который основан на объемном вытеснении рабочей среды (рабочей жидкости или сжатого воздуха), на высоком модуле упругости жидких рабочих сред и законе Б. Паскаля. Из рассмотренного в главе 1 уравнения Д. Бернулли видно, что движущаяся жидкость обладает тремя видами энергии: энергией положения (геометрический напор), энергией сжатой жидкости (пьезометрический напор, давление) и кинетической энергией потока (скоростной напор). Два первых вида представляют собой разновидности потенциальной энергии. Поэтому нетрудно видеть, что уравнение Д. Бернулли по сути своей есть закон сохранения энергии в изложении для движущейся жидкости. Посмотрим теперь, в каких случаях превалирует тот или иной вид энергии.
Энергия положения характеризуется высотой нахождения массы жидкости относительно плоскости сравнения. Этот вид энергии будет превалировать над другими при описании движения падающего с некоторой высоты потока движущейся с небольшой скоростью жидкости, например, воды. Поэтому геометрический напор учитывается при создании гидроэлектростанций.
Кинетическая энергия движущейся жидкости зависит от ее скорости. Поэтому этот вид энергии используется при разработке гидродинамических передач, в которых рабочая среда имеет сравнительно высокие скорости движения (например, центробежные насосы).
Энергия сжатой жидкости характеризуется давлением, которое есть (как это установлено в главе 1) по сути своей нормальное напряжение сжатия слоев рабочей среды под действием объемных и поверхностных сил. Поскольку в машиностроительном и мобильном оборудовании масса и скорость движущейся жидкости приводов сравнительно невелики, а перепады высот трубопроводов не превышают нескольких метров, постольку в таких приводах превалирующим является именно энергия сжатой жидкости.
Гидравлическим (пневматическим) приводом называется такое устройство, которое обеспечивает приведение в действие машин или механизмов и состоит из источника энергии, ее потребителей, аппаратуры и трубопроводов, по которым перемещается рабочая среда (жидкость для приводов и сжатый воздух для пневмоприводов).
Среда называется рабочей потому, что является носителем энергии и выполняет определенную работу и ряд функций (смазывание, охлаждение, вынос продуктов износа и др.). По существу действия гидравлический привод является устройством, преобразующим энергию движущейся жидкости в механическую энергию, а пневматический привод—устройством, преобразующим энергию сжатого воздуха тоже в механическую энергию.
Энергия сжатой рабочей среды легко преобразуется в механическую работу. Поясним это на примере простейшего объемного гидравлического привода, приведенного на рис.2.1 и состоящего из двух цилиндров 1 и 2, соединенных трубопроводом 3. Для того, чтобы поршень цилиндра 2 переместился, преодолевая силу сопротивления F2, на расстояние l2, необходимо совершить работу A = F2l2 . Для этого в нижнюю полость цилиндра 2 с эффективной площадью S2 необходимо подать объем жидкости W = S2l2 под давлением P, определяемым действием силы сопротивления F2, т.е. P = F2 /S2. Этот объем жидкости совершит работу, которая и нужна для перемещения поршня: A= PW = PS2l2 = F2l2. Необходимый объем рабочей среды W имеет массу m = ρS2l2, где ρ - плотность рабочей среды. Если разделить работу A на массу m, получим удельную (единичную) энергию Ey = A/m = PS2l2 /(ρS2l2) = P/ρ. Таким образом, последнее выражение показывает, что каждая частица объема W сжатой рабочей среды плотностью ρ имеет удельную энергию давления P/ρ, которая легко преобразуется в механическую работу. Но для того, чтобы подать рабочую среду в цилиндр 2, нужен, например, еще один цилиндр 1. При движении его поршня 4 вниз рабочая среда будет вытесняться в нижнюю полость цилиндра 2. Однако для выполнения этого движения к поршню цилиндра 1 следует приложить силу F1, которая будет преодолевать силу сопротивления, вызываемую давлением P. В соответствии с законом Паскаля это давление одинаково с давлением в полости цилиндра 2. Тогда без учета сил трения и инерции получим равенство P = F1/S1 = F2/S2 . Отсюда легко видеть, что, приложив к поршню цилиндра 1 силу F1, поршень цилиндра 2 может преодолеть силу F2 во столько раз большую, во сколько раз площадь S2 больше эффективной площади S1, т.е. F2 = F1S2 /S1. С другой стороны, чтобы вытеснить необходимый для перемещения поршня цилиндра 2 объем W, поршень цилиндра 1 должен переместиться на расстояние l1 (без учета возможных утечек). Тогда можно записать W = l2S2 = l1S1. Отсюда нетрудно получить l2 = l1S1 /S2 и сделать вывод о том, что перемещение поршня 5 цилиндра 2 будет меньшим перемещения поршня цилиндра 1 во столько раз, во сколько раз площадь поршня цилиндра 1 меньше площади поршня цилиндра 2. Таким образом, получаем подтверждение «золотого правила» механики для объемных приводов: выигрываем в силе - проигрываем в пути. Такое свойство гидравлических приводов изменять силы и длину перемещения часто называют «гидравлическим рычагом» по аналогии с механическим рычажным устройством.
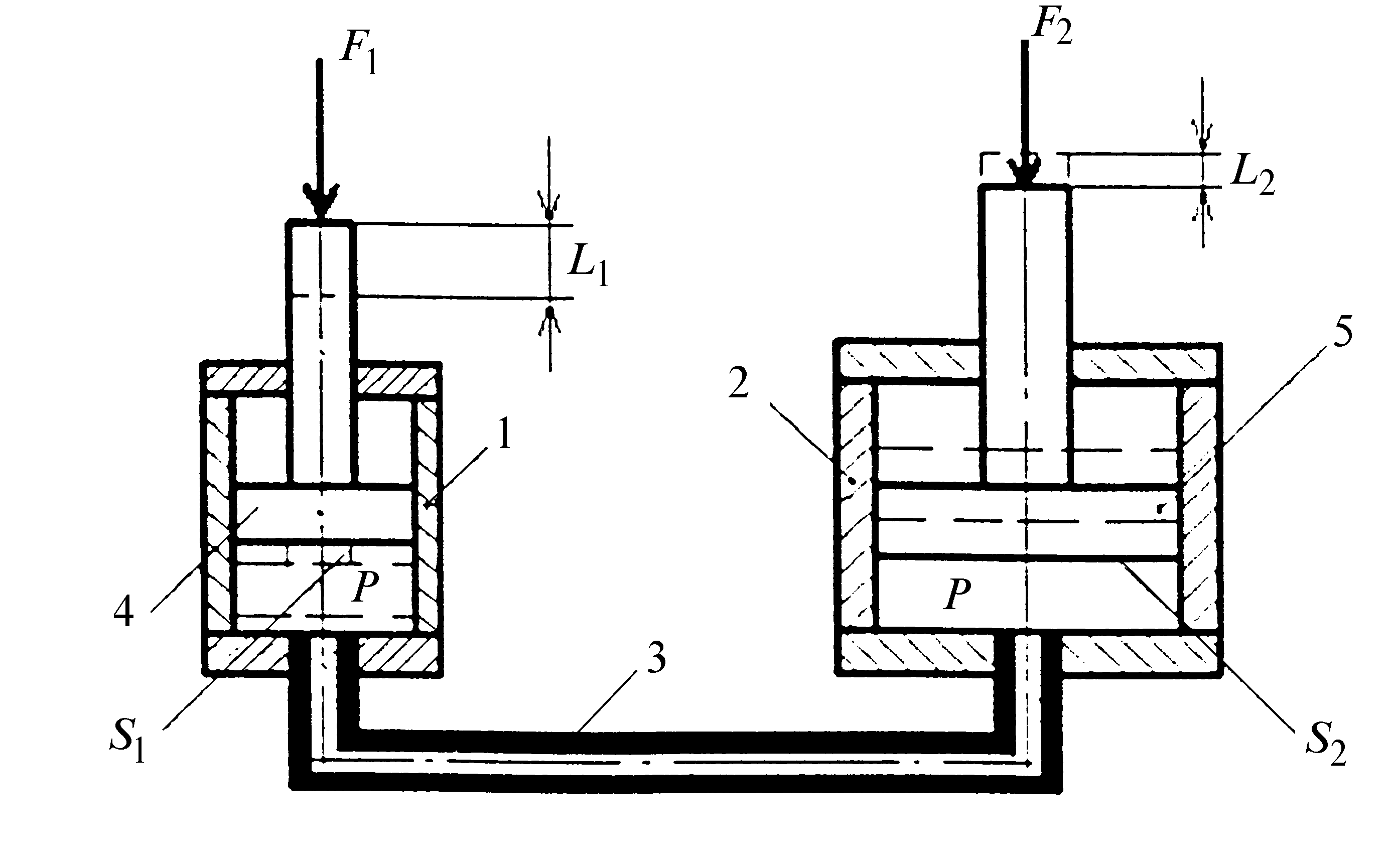
Рис.2.1. Принцип действия объемного привода
Рассмотренная работа двух соединенных между собой цилиндров раскрывает принцип действия объемных гидравлических и пневматических приводов, на котором построены и гидравлические усилители, и гидравлические прессы, и другие гидравлические и пневматические машины и устройства.
Выбор того или иного привода при проектировании какого-либо оборудования или машины во многом определяется учетом его особенностей при соответствующих условиях работы.
Особенностями гидравлических приводов являются следующие их характеристики и возможности:
- Наиболее важной особенностью является высокая энергоемкость гидравлических приводов, т.е. возможность получения больших сил и мощностей при сравнительно небольших габаритных размерах и собственной массе гидравлических двигателей. Например, размеры современных моторов составляют около 20% габаритных размеров электродвигателей переменного тока той же мощности. Обычно энергоемкость характеризуется отношением развиваемой двигателем мощности к его объему или массе. По этому показателю гидравлические двигатели имеют преимущество перед другими типами двигателей.
- Высокая напряженность рабочей среды (возможность получения высоких давлений). В приводах общемашиностроительного назначения давление рабочей среды может достигать 35–50 МПа, в приводах специального назначения – 100 МПа и более. По этому показателю гидравлические двигатели значительно опережают электрические двигатели. Так, например, если представить напряженность магнитного поля в воздушном зазоре между статором и ротором электродвигателя в виде давления 2, то последнее составит лишь 0,5–1,0 МПа. Высокие давления в приводах достигаются благодаря большой жесткости рабочей жидкости, на что указывает значительный по величине ее модуль упругости, достигающий 1500 МПа и более. Именно благодаря такому достоинству и получаются высокие силы и мощности при малых габаритах и массе гидравлических двигателей.
- Возможность получения простыми средствами бесступенчатого регулирования скорости в широком диапазоне. Так, для поступательных движений изменение скоростей может быть в пределах от 3 мм/ мин до 90 м/мин, для вращательных – от 0,1 до 50 000 оборотов в мин. Диапазон регулирования скорости мотора (величина отношения максимальной частоты вращения к минимальной) может достигать 1000.
- Малая инерционность и компактность их двигателей. Это позволяет получить частые и быстрые переключения двигателя с одного направления движения на противоположное (реверсы). Так, например, для моторов указанная частота может достигать 10 Гц, для цилиндров – до 7 Гц, а время, затрачиваемое мотором мощностью 3,75 кВт на реверс с частоты вращения 2500 1/мин и набор этой скорости в противоположном направлении, составляет 0,02 с, что почти на два порядка быстрее, чем у асинхронного электродвигателя такой же мощности.
- Отсутствие, как правило, дополнительных механических передач между двигателем и исполнительным органом машины или технологического оборудования, необходимых для согласования их нагрузочных и скоростных характеристик.
- Возможность стабилизации работы привода при переменных нагрузках и температуре простыми средствами.
- Простота и надежность предохранения гидравлического привода от поломок при внезапных перегрузках.
- Долговечность и надежность гидравлического привода благодаря его работе в условиях хорошей смазываемости (при применении в качестве рабочих жидкостей минеральных масел), обеспечивающей слабый износ и малые силы трения.
- Нагрев рабочей жидкости и омываемых ею деталей привода, что
приводит к уменьшению вязкости рабочей среды, увеличению зазоров
и, как следствие, росту объемных потерь. Это в свою очередь снижает
коэффициент полезного действия привода и вызывает дополнительные затраты на сбор утечек, охлаждение и устранение возможной нестабильности движения исполнительных органов. - Простота и удобство монтажа гидравлических устройств и аппаратов (особенно при использовании гибких шлангов). Местоположение источника энергии не влияет на компоновку исполнительных механизмов оборудования.
- Необходимость квалифицированного и опытного обслуживающего персонала, вызванная использованием в приводах достаточно сложного, точного и дорогостоящего оборудования и аппаратов.
- Повышенная пожарная опасность при применении в качестве рабочих сред минеральных масел и возможность загрязнения окружающей среды и оказания вредного влияния на здоровье человека.
К особенностям пневматических приводов относят следующие характеристики и возможности:
- Высокая сжимаемость рабочей среды (воздуха) и связанная с этим нестабильность скорости движения исполнительного органа
привода при переменной нагрузке. - Большие скорости движения пневмодвигателей, достигающие 15 м/с для поступательных движений и 100000 1/мин для вращательных движений.
- Более высокие, чем у приводов, скорости потока рабочей среды в трубопроводах, достигающие величин 17–20 м/с. Это допустимо благодаря малой вязкости и массе воздуха.
- Простота циклового управлении япо перенастраиваемым упорам.
- Высокая точность позиционирования по жестким упорам.
- Возможность работы в агрессивных, пожаро- и взрывоопасных, запыленных, электромагнитных и радиоактивных средах.
- Малая чувствительность к ударным нагрузкам и вибрациям.
- Простота и надежность конструкции пневмоаппаратов и удобство компоновки элементов пневмопривода благодаря гибким шлангам и отсутствию выхлопных трубопроводов (выхлоп отработанного сжатого воздуха производится, как правило, непосредственно в атмосферу).
- Невысокая стоимость элементов пневмопривода из-за несложного изготовления благодаря их работе при небольших давлениях до 1 МПа.
- Возможность повышенной коррозии пневмоаппаратов и устройств из-за выделения влаги при расширении воздуха и его охлаждении.
- Невысокая смазывающая способность воздуха, что требует устраивать принудительное распыление масла в поток воздуха.
- Необходимость подготовки сжатого воздуха и применения в ответственных приводах устройств сушки, влагоотделения и очистки от загрязнений.
- Ограниченность числа точек позиционирования в цикловых системах управления (обычно это две точки).
- Необходимость применения тормозных устройств в конце хода пневматических двигателей из-за высоких скоростей движения с
целью предотвращения повышенного износа жестких упоров. - Наличие повышенного шума при работе пневматических приводов и необходимость установки шумогасителей (глушителей).
Анализируя указанные особенности приводов и накладывая их на реальные условия работы проектируемого привода, можно определить направление поиска подходящего технического решения в области типа привода.
Классифицируя привода по их служебному назначению, можно выделить три группы гидравлических и пневматических приводов: привода главного движения, привода подач и привода вспомогательных движений или вспомогательных устройств. Если в качестве примера гидрофицированного технологического оборудования выбрать металлорежущий станок, то приводом главного движения будет привод, обеспечивающий создание скорости резания, приводом подач будет привод, обеспечивающий получение движения подачи, а приводом вспомогательных движений – например, привод смены инструмента, привод зажима детали или привод деления (при зубообработке). Для промышленного робота или манипулятора в составе обрабатывающего технологического комплекса, когда он обеспечивает загрузочно-разгручные операции, а обработку детали ведет многоцелевой станок, любой гидравлический или пневматический привод (руки, схвата и т.д.) следует относить к приводам вспомогательных движений.
По способу изменения скорости движения гидравлические и пневматические привода можно разделить на регулируемые и нерегулируемые. Регулируемые привода – те, которые способны изменять скорость движения своего двигателя либо ступенчато, либо бесступенчато (плавно). Нерегулируемые приводы обеспечивают одну постоянную скорость движения двигателя.
Но как бы мы не классифицировали гидравлические и пневматические приводы, используя для этого другие признаки или критерии, все они структурно одинаковы. Их структура приведена на рис.2.2. Любой гидравлический или пневматический привод в своем составе содержит источник энергии 1, потребитель энергии 2, гидравлическую или пневматическую аппаратуру 3, подключаемую к источнику энергии или ее потребителю последовательно и параллельно, и трубопроводы, соединяющие все элементы структуры между собой и подводящие к ним рабочую среду.

Рис.2.2. Структурная схема объемного привода
Источником энергии гидравлических приводов является насос, представляющий собой преобразователь подведенной к нему энергии в энергию движущейся жидкости. Сам насос приводится в действие либо электрическим двигателем, либо двигателем другого типа, например, двигателем внутреннего сгорания (в автомобильной, сельскохозяйственной и т.п. технике). Источник энергии пневмоприводов—компрессорная станция (или просто компрессор), являющаяся преобразователем подведенной к ней энергии в энергию сжатого воздуха. Компрессор приводится в действие тоже электродвигателем или двигателем любого другого типа.
Потребителями энергии рассматриваемых приводов являются двигатели, которые по сути своей есть преобразователи подведенной к ним энергии в механическую работу. По виду движения различают двигатели для получения поступательных, вращательных и качательных (возвратно-вращательных) движений. Двигатели поступательных движений – это гидравлические или пневматические цилиндры (цилиндры, пневмоцилиндры или просто цилиндры). Двигатели вращательных движений называются моторами. Для приводов – это моторы, для пневмоприводов – пневмомоторы. Для осуществления возвратно-вращательных (качательных) движений применяют неполноповоротные гидро- или пневмомоторы (или специальные цилиндры с механическими передачами).
Аппаратура гидро- и пневмоприводов представляет собой устройства, обеспечивающие настройку необходимых по условиям работы характеристик и параметров самих приводов, а также способствующие надежной и долговечной их работе.
Трубопроводы – это гидравлические и пневматические линии передачи энергии. Могут быть жесткими (изготавливаются из металлических труб) и гибкими (изготавливаются из армированных или неармированных труб на основе прорезиненных материалов, полихлорвинила и т.п.). Гибкие трубопроводы часто называют шлангами или рукавами.
Последним элементом структуры приводов является рабочая среда. Как уже отмечалось выше, она является рабочим телом, передающим энергию и выполняющим ряд других важнейших функций. Очень существенным является правильный выбор типа рабочей жидкости для приводов, так как она напрямую влияет на надежность и долговечность работы привода в целом и его элементов. Разновидности рабочих сред, их свойства и характеристики рассмотрены в главе 1.
Для того, чтобы обеспечить выполнение приводом его служебного назначения, необходимо им управлять. Управление приводами может быть ручным (т.е. с полным участием человека - оператора), автоматизированным (частичное участие человека в процессе управления) и автоматическим (без участия человека). Но без наличия соответствующих управляющих устройств сам процесс управления не будет возможным. Для этого нужна определенная система управления приводом, которая представляет собой совокупность управляющих устройств и форму организации процесса управления [2]. Гидравлические и пневматические привода могут быть с разомкнутой или замкнутой системами управления. Замкнутая система управления отличается от разомкнутой тем, что при функционировании такой системы управления выходные параметры работы привода (величина перемещения, скорости и ускорения движения, силы и др.) все время сопоставляются с заранее заданными значениями этих параметров в специальных сравнивающих устройствах. Если эти значения не совпадают, то вырабатывается сигнал рассогласования и посылается на вход управляющего органа системы, который обеспечивает работу привода на устранение возникшего рассогласования. Для обеспечения такого функционирования замкнутые системы управления оснащаются обратными связями.
Комплекс, состоящий из гидравлического (или пневматического) привода и системы управления, обычно называют гидравлической (или пневматической) системой. Структурно такой комплекс можно представить состоящим из нескольких подсистем: энергообеспечивающая, исполнительная, направляющая и регулирующая, информационная и логико-вычислительная подсистемы.
Под энергообеспечивающей подсистемой понимается совокупность источников энергии для обеспечения работы как самого привода, так и его системы управления. Ведь для работы, например, гидравлической системы могут быть использованы несколько видов энергоносителя. Так, для привода это будет рабочая жидкость, а для его системы управления – рабочая жидкость (тогда это гидравлическая система управления), сжатый воздух (пневматическая система управления), электрический ток (электронная или релейно-контактная система управления). Такое сочетание может быть и для пневматических систем. В тех случаях, когда система в целом потребляет разные виды энергии, она называется комбинированной. Встречаются и такие комбинированные системы, в которых задействованы гидравлический и пневматический приводы и система управления с разными энергоносителями. Все это зависит условий работы оборудования и его служебного назначения.
Исполнительная подсистема включает в себя все используемые двигатели и рабочие органы машин или механизмов, приводимые в движение этими двигателями.
Направляющая и регулирующая подсистема названа так потому, что включает в себя всю аппаратуру гидравлических и пневматических систем, предназначенную для регулирования параметров систем и изменения направления движения их двигателей.
Информационная подсистема охватывает контрольную и измерительную аппаратуру, дающую сведения о ходе работы системы в целом и процесса управления ею.
Логико-вычислительная подсистема включает в себя применяющуюся аппаратуру системы управления, обеспечивающую выполнение логических и вычислительных задач.
Ниже приводится описание всех элементов гидропневмосистем, их возможностей, достоинств и недостатков, а также даются рекомендации по расчету и выбору.
